
- Startseite
- Produkt
- GOST-Standardmotor
- IEC-Standardmotor
 MC-Serie Einphasen-Kondensator-Anlauf-Asynchronmotor
MC-Serie Einphasen-Kondensator-Anlauf-Asynchronmotor- MY/MYT-Serie Einphasen-Kondensatorlauf-Asynchronmotor
- ML-Serie Einphasen-Asynchronmotor mit Doppelkondensator
- ME2-Serie hocheffizienter Drehstrommotor mit Aluminiumgehäuse (IE2)
- ME3-Serie hocheffizienter Drehstrommotor mit Aluminiumgehäuse (IE3)
- MS-Serie Drehstrommotor mit Aluminiumgehäuse (IE1)
- Y2-Serie Drehstrommotor mit Gusseisengehäuse (IE1)
- YE2-Serie hocheffizienter Drehstrommotor mit Gusseisengehäuse (IE2)
- YE3-Serie hocheffizienter Drehstrommotor mit Gusseisengehäuse (IE3)
- Spezialmotor für Sonderanwendungen
- Rolltorantrieb
- Industrieanwendung
- Nachrichten
- Über uns
- Kontaktieren Sie uns














Induction Motors and Synchronous Motors
Motoren sind in unserem Alltag und der industriellen Produktion allgegenwärtig. Von Klimaanlagen und Waschmaschinen in unseren Haushalten über Förderbänder und Werkzeugmaschinen in Fabriken bis hin zu Stromaggregaten in Kraftwerken – überall dort, wo Energie benötigt wird, finden sich Motoren. Unter den vielen Motortypen sind Induktionsmotoren und Synchronmotoren die beiden wichtigsten und am häufigsten verwendeten Wechselstrommotoren. Sie scheinen in ihrer Funktion ähnlich zu sein, da beide elektrische Energie in mechanische Energie umwandeln, doch sie besitzen völlig unterschiedliche Eigenschaften und Fähigkeiten, wobei jeder Motortyp in seinem jeweiligen Anwendungsgebiet herausragende Leistungen erbringt. Heute wollen wir uns mit diesen beiden Motortypen genauer befassen und ihre Unterschiede, Merkmale und die Geheimnisse ihrer vielfältigen Einsatzmöglichkeiten im Alltag beleuchten.
Der Kernunterschied: Rotordrehzahl vs. rotierendes Magnetfeld des Stators
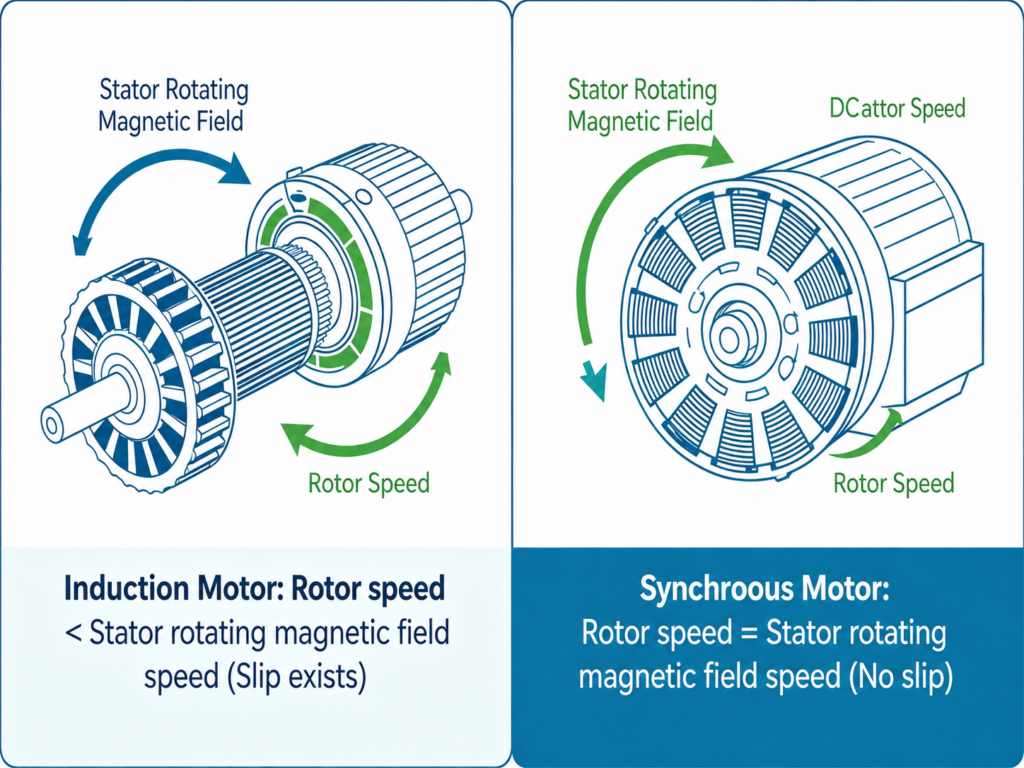
Um Induktionsmotoren von Synchronmotoren zu unterscheiden, müssen wir zunächst ihren entscheidenden Unterschied verstehen: das Verhältnis zwischen der Drehzahl des Rotors und der Drehzahl des rotierenden Magnetfelds des Stators. Nur anhand dieser beiden Aspekte können wir sie als „Synchronmotoren“ und „Induktionsmotoren“ bezeichnen. Vereinfacht gesagt, ist die Rotordrehzahl eines Synchronmotors stets mit der Drehzahl des rotierenden Magnetfelds des Stators synchronisiert, vergleichbar mit zwei Personen, die Händchen haltend im Gleichschritt laufen. Im Gegensatz dazu ist die Rotordrehzahl eines Induktionsmotors immer etwas niedriger als die Drehzahl des rotierenden Magnetfelds des Stators, ähnlich wie jemand, der seinem Begleiter hinterherläuft und immer einen kleinen Schritt hinterherhinkt. Dieser Drehzahlunterschied wird als „Schlupf“ bezeichnet und ist entscheidend für die Leistungsfähigkeit eines Induktionsmotors.
Induktionsmotoren: Der zuverlässige Allrounder
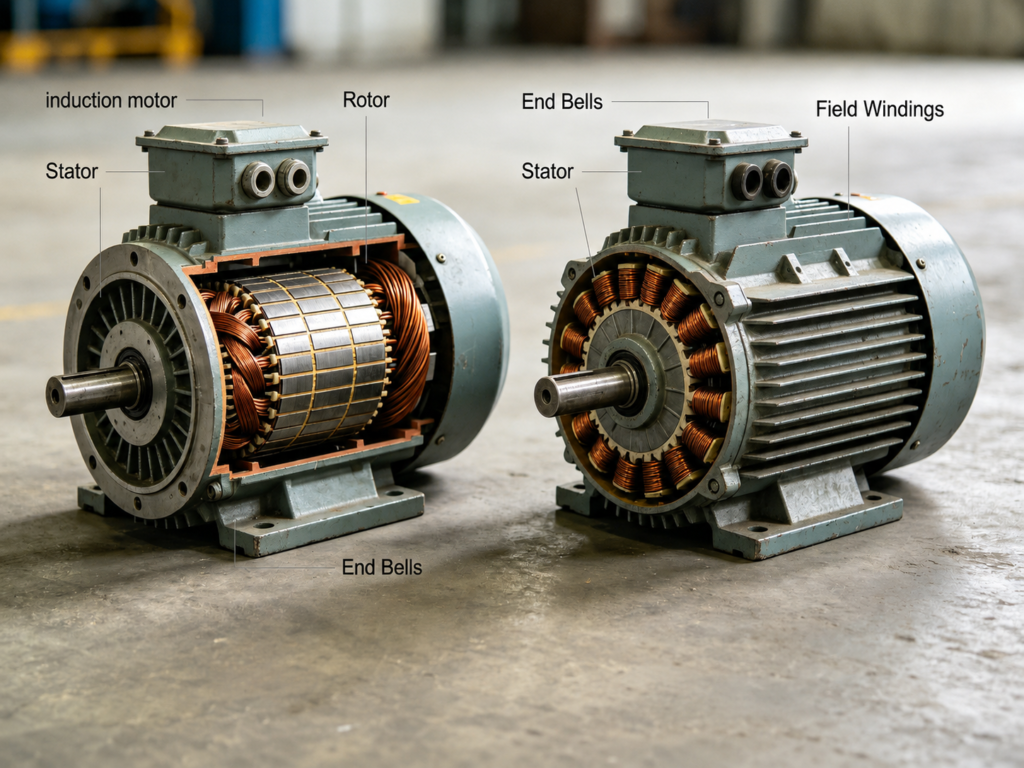
Struktur: Einfach und robust
Der Aufbau eines Induktionsmotors ist sehr einfach und besteht im Wesentlichen aus einem Stator und einem Rotor, ohne komplexe Zusatzbauteile. Der Stator ist der feststehende Teil des Motors und besteht aus gestapelten Siliziumstahlblechen, um die dreiphasige Wicklungen gewickelt sind. Beim Anlegen von Wechselstrom erzeugt der Stator ein rotierendes Magnetfeld, das dem Rotor ein Drehfeld vorgibt. Der Rotor ist meist ein Kurzschlussläufer; wie der Name schon sagt, werden nach dem Entfernen des Eisenkerns die Leiterbahnen und Kurzschlussringe an beiden Enden des Rotors verbunden, wodurch er seine käfigartige Form erhält. Er besteht üblicherweise aus Aluminiumguss oder Kupfer und ist robust und wenig anfällig für Beschädigungen. Es gibt auch Schleifringläufer mit unabhängigen dreiphasigen Wicklungen auf dem Rotor, die über Schleifringe mit einem externen Widerstand verbunden werden können, diese Bauart wird jedoch heutzutage kaum noch verwendet.
Funktionsprinzip: Angetrieben durch elektromagnetische Induktion
Das Funktionsprinzip des Induktionsmotors beruht vollständig auf dem Grundgesetz der elektromagnetischen Induktion. Wird an die Statorwicklungen Drehstrom angelegt, entsteht ein rotierendes Magnetfeld. Dieses Magnetfeld wandert schnell über die stationären Rotorleiter. Gemäß dem Faradayschen Induktionsgesetz wird in einem Leiter, der sich in einem Magnetfeld bewegt, eine elektromotorische Kraft (EMK) induziert. Die Rotorleiter bilden einen geschlossenen Stromkreis, und diese EMK erzeugt einen induzierten Strom. Dieser induzierte Strom erfährt im rotierenden Magnetfeld eine elektromagnetische Kraft, wodurch ein elektromagnetisches Drehmoment entsteht, das den Rotor in Rotation versetzt.
Ein Schlüsselphänomen: Der „Schlupf“, der die Leistungsabgabe ermöglicht
Hier ist ein interessantes Phänomen, das Ihnen vielleicht schon aufgefallen ist: Der Rotor holt die Drehzahl des rotierenden Magnetfelds des Stators nur selten ein. Wäre die Drehzahl des Rotors exakt gleich der des Magnetfelds, gäbe es keine Relativbewegung zwischen ihnen. Die Rotorleiter würden die magnetischen Feldlinien nicht schneiden, und somit könnte kein induzierter Strom oder elektromagnetisches Drehmoment erzeugt werden, wodurch der Rotor sofort seine Leistung verlieren würde. Daher muss die Rotordrehzahl eines Induktionsmotors etwas niedriger sein als die Drehzahl des Magnetfelds; der Schlupf liegt typischerweise zwischen 1 % und 5 %. Dieser geringe Unterschied ermöglicht die kontinuierliche Leistungsabgabe. Beispielsweise scheint sich der Ventilator in unseren Wohnungen gleichmäßig zu drehen, doch tatsächlich folgt der Rotor ständig dem Magnetfeld; der Drehzahlunterschied ist so gering, dass er mit bloßem Auge nicht wahrnehmbar ist.
Vorteile und Nachteile
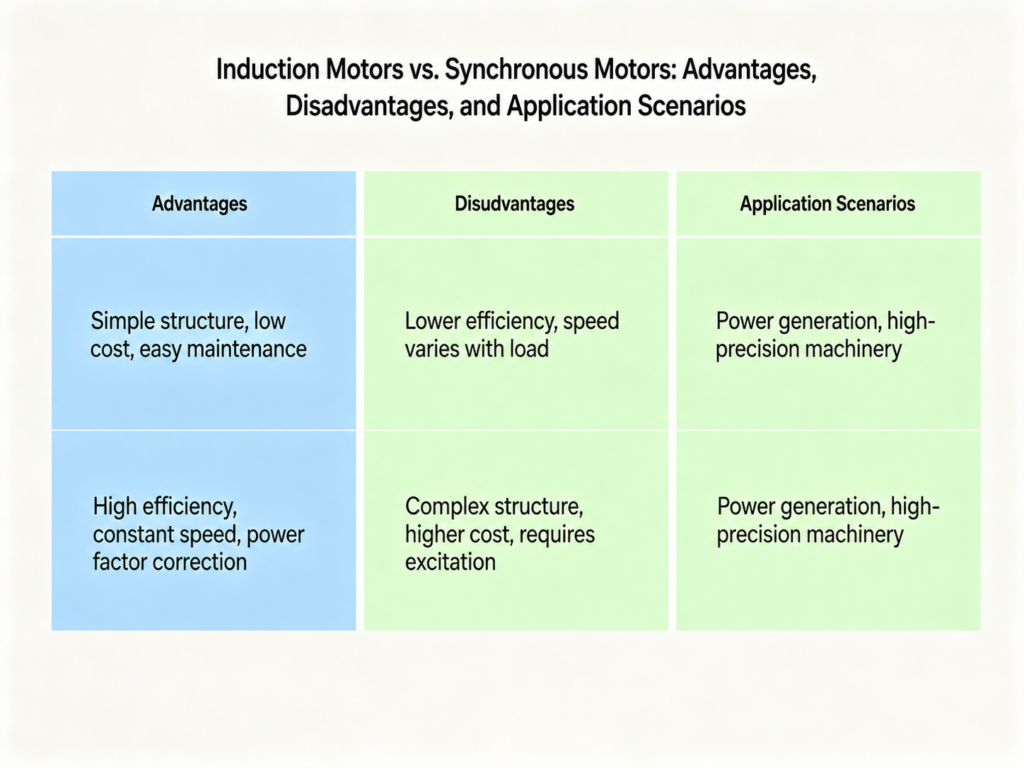
Induktionsmotoren bieten viele Vorteile. Sie sind beispielsweise einfach und robust, wartungsarm, kostengünstig in der Herstellung und starten automatisch ohne zusätzliche Hilfseinrichtungen. In der Praxis müssen sie lediglich an eine Stromquelle angeschlossen werden, um sich automatisch zu drehen. Dies ist der Schlüssel zu ihrer weitverbreiteten Anwendung in Haushalten und der Industrie. Allerdings weisen sie auch Nachteile auf. Sie beziehen stets Blindleistung aus dem Netz, um das Drehfeld aufzubauen. Dies führt zu einer Leistungsfaktorverzögerung, die zusätzliche Kondensatoren und andere Kompensationskomponenten erfordert. Darüber hinaus sinkt die Drehzahl bei fester Frequenz mit steigender Last, sodass eine absolut konstante Drehzahl nicht erreicht werden kann. Auch die Drehzahlregelung ist nicht so präzise wie bei Synchronmotoren. Zwar lässt sich die Drehzahl durch Frequenzumwandlung und Polumschaltung anpassen, jedoch kann in hochpräzisen Anwendungen nicht der maximale Wirkungsgrad erzielt werden.
Anwendungsbereiche: Allgegenwärtig im Alltag und in der Industrie
Induktionsmotoren sind aus Anwendungssicht nahezu allgegenwärtig. Sie finden breite Anwendung in verschiedensten Bereichen, von Haushaltsgeräten wie Klimaanlagenkompressoren, Waschmaschinen und Ventilatoren über Fabrikanlagen wie Ventilatoren, Pumpen, Förderbänder und Werkzeugmaschinen bis hin zu diversen Maschinen im Bergbau und in der Landwirtschaft. Als Allrounder sind sie anspruchslos hinsichtlich ihrer Betriebsumgebung und benötigen keine hohe Präzision. Sie brauchen lediglich Strom, um geräuschlos Energie abzugeben. Darüber hinaus können Induktionsmotoren in drei Betriebszuständen arbeiten: Motorbetrieb, Generatorbetrieb und elektromagnetischer Bremsbetrieb, wobei sie meist als Motor fungieren.
Synchronmotoren: Der Präzisionsexperte
Kernmerkmal: Perfekte Synchronisation
Nachdem wir Induktionsmotoren besprochen haben, kommen wir nun zum Präzisionsexperten unter den Motoren: dem Synchronmotor. Während Induktionsmotoren auf Praktikabilität und Langlebigkeit setzen, zeichnen sich Synchronmotoren durch Präzision und Effizienz aus. Sie bilden das Herzstück von Energiesystemen und sind insbesondere bei der großtechnischen Energieerzeugung und in hochpräzisen Antriebsanwendungen unverzichtbar.
Das Kernmerkmal eines Synchronmotors ist die vollständige Synchronisation seiner Rotordrehzahl mit der Drehzahl des Stators im Magnetfeld. Dies spiegelt sich in der Formel n = ns = 60f/p wider, wobei f die Netzfrequenz und p die Polpaarzahl ist. Solange die Netzfrequenz konstant ist, bleibt die Drehzahl des Synchronmotors unabhängig von der Lastgröße konstant. Wie ein disziplinierter Soldat, der unabhängig von der Schwierigkeit der Aufgabe ein gleichmäßiges Tempo beibehält, zeichnet sich diese Eigenschaft den Synchronmotor in Anwendungen aus, die konstante Drehzahl und hohe Präzision erfordern.
Struktur: Komplexer, vielfältiger
Im Vergleich zu Induktionsmotoren weisen Synchronmotoren eine komplexere Struktur und eine größere Vielfalt an Rotortypen auf. Ihre Rotoren benötigen eine unabhängige Magnetfeldquelle und werden hauptsächlich in drei Typen unterteilt: Erregerwicklungsrotor, Permanentmagnetrotor und Reluktanzrotor. Der Erregerwicklungsrotor besitzt Spulenwicklungen, die über Schleifringe und Bürsten mit Gleichstrom erregt werden; dies ist die gebräuchlichste Bauform großer Synchronmotoren. Der Permanentmagnetrotor besteht aus Permanentmagneten wie beispielsweise Neodym-Eisen-Bor; er benötigt keine externe Gleichstromerregung und hat eine relativ einfache Struktur. Er findet breite Anwendung in kleinen und mittelgroßen Anlagen, beispielsweise in Antriebsmotoren für Elektrofahrzeuge. Der Reluktanzrotor besteht aus einem speziell geformten Eisenkern; er besitzt weder Wicklungen noch Permanentmagnete und erzeugt sein Drehmoment durch das Prinzip des minimalen magnetischen Widerstands. Seine Steuerung ist vergleichsweise komplexer.
Funktionsprinzip: Anziehung zwischen entgegengesetzten Polen
Das Funktionsprinzip eines Synchronmotors ähnelt eher der Anziehung zwischen entgegengesetzten Polen. Wenn dreiphasiger Wechselstrom an die Statorwicklungen angelegt wird, entsteht ein rotierendes Magnetfeld. Der Rotor erzeugt durch Erregung oder Permanentmagnete ein konstantes Magnetfeld. Wenn die Anzahl der Polpaare im Rotormagnetfeld der Anzahl der Polpaare im Statormagnetfeld entspricht, wirkt das rotierende Magnetfeld des Stators wie ein Magnet, der das Rotormagnetfeld anzieht und den Rotor dazu bringt, sich synchron zu drehen. Es gibt jedoch ein kleines Problem: Synchronmotoren können nicht direkt starten, da die Drehzahl des Statormagnetfelds bei stillstehendem Rotor zu hoch ist, um den Rotor sofort auf die Synchrondrehzahl zu bringen. Daher ist zum Starten der Wicklungen Hilfsenergie erforderlich. Sobald sich die Drehzahl der Synchrondrehzahl nähert, wird eine Gleichstromerregung angelegt, um den Rotor in Synchronisation zu bringen. Alternativ kann ein Frequenzumrichter verwendet werden, um die Stromversorgungsfrequenz ausgehend von der Drehzahl Null schrittweise zu erhöhen und so einen sanften Start zu erreichen.
Vorteile und Nachteile
Die Vorteile von Synchronmotoren können die Nachteile von Induktionsmotoren präzise ausgleichen. Permanentmagnet-Synchronmotoren (PMSM) können ihren Leistungsfaktor automatisch anpassen. Durch die Änderung der Rotorerregerstromstärke können sie als induktive, kapazitive oder sogar synchrone Kompensatoren fungieren, Blindleistung ins Netz einspeisen und dessen Leistungsfaktor verbessern – entscheidend für den stabilen Betrieb von Stromnetzen. Bei gleicher Nennleistung weisen PMSM den höchsten Wirkungsgrad auf, da der Rotor keine Kupferverluste aufweist, was zu einem geringeren Energieverbrauch führt. Darüber hinaus erfüllen ihre konstante Drehzahl und die hohe Drehzahlregelungsgenauigkeit die Anforderungen von Hochpräzisionsantrieben.
Synchronmotoren weisen jedoch auch Nachteile auf: höhere Herstellungskosten, insbesondere aufgrund der hohen Kosten für Permanentmagnetmaterialien; ein komplexer Aufbau, der ein Erregersystem und Schleifringbürsten erfordert und dadurch relativ hohe Wartungskosten verursacht, da die Schleifringbürsten regelmäßig ausgetauscht werden müssen; und die fehlende Selbststartfähigkeit, die ein zusätzliches Anlaufgerät notwendig macht. Diese Eigenschaften schränken ihre Verbreitung im Vergleich zu Induktionsmotoren ein und konzentrieren ihre Anwendungen auf Bereiche, die hohe Präzision, Effizienz und konstante Drehzahl erfordern.
Anwendungsbereiche: Konzentriert auf High-End-Bereiche
Synchronmotoren finden vorwiegend in High-End-Bereichen Anwendung. Thermische, Wasserkraft- und Kernkraftwerke nutzen fast ausschließlich Synchrongeneratoren, die mechanische Energie in elektrische Energie umwandeln und so eine stabile Stromversorgung des gesamten Stromnetzes gewährleisten. Große Industrieanlagen wie Luftkompressoren, Großventilatoren und Kugelmühlen erfordern einen Betrieb mit konstanter Drehzahl und reagieren empfindlich auf den Leistungsfaktor; auch hier kommen typischerweise Synchronmotoren zum Einsatz. In der Präzisionsfertigung werden CNC-Werkzeugmaschinenspindeln, Hochgeschwindigkeitsanlagen und Servoantriebssysteme meist mit Permanentmagnet-Synchronmotoren betrieben. Deren hochpräzise Drehzahlregelung sorgt für hohe Bearbeitungsgenauigkeit. Auch Antriebsmotoren von Elektrofahrzeugen setzen zunehmend auf Permanentmagnet-Synchronmotoren, um ein optimales Verhältnis von Effizienz und Leistung zu erzielen.
Induktionsmotoren vs. Synchronmotoren: Keine absolute Überlegenheit, nur geeignete Alternativen
Sie sollten nun Induktionsmotoren und Synchronmotoren klar unterscheiden können. Tatsächlich gibt es keine absolute Überlegenheit oder Unterlegenheit zwischen ihnen; sie haben einfach ihre Stärken und Einsatzgebiete, die sich ergänzen. Vereinfacht gesagt sind Induktionsmotoren wie zuverlässige und leistungsfähige Alltagsmenschen – einfach aufgebaut, kostengünstig und langlebig – und decken den Großteil des täglichen und industriellen Energiebedarfs ab. Synchronmotoren hingegen sind wie hochpräzise Profis – hocheffizient und in der Lage, den Leistungsfaktor anzupassen, um auch anspruchsvolle und hochpräzise Leistungsanforderungen zu erfüllen. Ein einfacher Vergleich verdeutlicht dies: Vergleicht man Motoren mit Autos, so sind Induktionsmotoren wie Familienlimousinen – erschwinglich, robust und für die meisten Bedürfnisse im Alltag geeignet. Synchronmotoren hingegen sind wie High-End-Sportwagen oder Spezialfahrzeuge.
Diese Fahrzeuge sind leistungsstark und hochpräzise. Sie sind zwar teuer und wartungsintensiver, können aber Aufgaben bewältigen, die normale Autos nicht erfüllen können.
Fazit: Komplementäre Energie für ein besseres Leben
Im praktischen Einsatz hängt die Wahl des Motors in erster Linie von den spezifischen Anforderungen ab. Insbesondere für Haushaltsgeräte und allgemeine Industriemaschinen, bei denen die Geschwindigkeitsgenauigkeit nicht entscheidend ist und die Budgets begrenzt sind, sind Induktionsmotoren die beste Wahl. Für die Stromerzeugung in großem Maßstab, Präzisionsbearbeitung und High-End-Geräte, die eine konstante Geschwindigkeit, hohe Präzision, einen hohen Wirkungsgrad oder eine Anpassung des Leistungsfaktors erfordern, sind Synchronmotoren die beste Option. Durch den technologischen Fortschritt verbessert sich die Leistung beider Motortypen ständig. Beispielsweise steigt der Wirkungsgrad hocheffizienter Induktionsmotoren kontinuierlich, während die Kosten für Permanentmagnet-Synchronmotoren allmählich sinken. Ihre Anwendungen überlappen und erweitern sich zunehmend und bieten gemeinsam eine stärkere und effizientere Energieunterstützung für unser Leben und die industrielle Produktion.
Von Teslas Erfindung des Induktionsmotors bis zur zentralen Rolle des Synchronmotors im Energiesystem hat die Entwicklung dieser beiden Motortypen nicht nur den Fortschritt der Energiewirtschaft miterlebt, sondern auch unser Leben verändert. Obwohl sie lediglich Objekte sind, bergen sie die raffiniertesten physikalischen Prinzipien; scheinbar gewöhnlich, ermöglichen sie den reibungslosen Ablauf des modernen Lebens. Ob der Ventilator in Ihrem Zuhause oder die brummenden Generatoren in einem Kraftwerk – sie alle arbeiten lautlos. Ich hoffe, dieser Artikel hat Ihnen ein besseres Verständnis der Unterschiede und Eigenschaften von Induktions- und Synchronmotoren vermittelt. Dies hilft uns nicht nur, die Funktionsprinzipien der Geräte um uns herum besser zu verstehen, sondern lässt uns auch die Faszination der Technologie erkennen. Jedes scheinbar einfache Gerät verkörpert menschliche Weisheit und Entdeckergeist.