
- Главная
- Продукт
- Двигатель стандарта ГОСТ
- Двигатель стандарта IEC
 Однофазный асинхронный двигатель серии MC с пусковым конденсатором
Однофазный асинхронный двигатель серии MC с пусковым конденсатором- Однофазный асинхронный двигатель серии MY/MYT с рабочим конденсатором
- Однофазный асинхронный двигатель серии ML с двумя конденсаторами
- Трёхфазный двигатель серии ME2 с алюминиевым корпусом, высокая эффективность
- Трёхфазный двигатель серии ME3 с алюминиевым корпусом, высокая эффективность
- Трёхфазный двигатель серии YE2 с чугунным корпусом, высокая эффективность (IE2)
- Трёхфазный двигатель серии MS с алюминиевым корпусом (IE1) .
- Трёхфазный двигатель серии Y2 с чугунным корпусом (IE1)
- Трёхфазный двигатель серии YE3 с чугунным корпусом, высокая эффективность (IE3)
- Двигатель специального назначения
- Двигатель для роллетных ворот
- Промышленное применение
- Новости
- О нас
- Свяжитесь с нами














Как работает трехфазный шаговый двигатель?
Что такое трёхфазный шаговый двигатель?
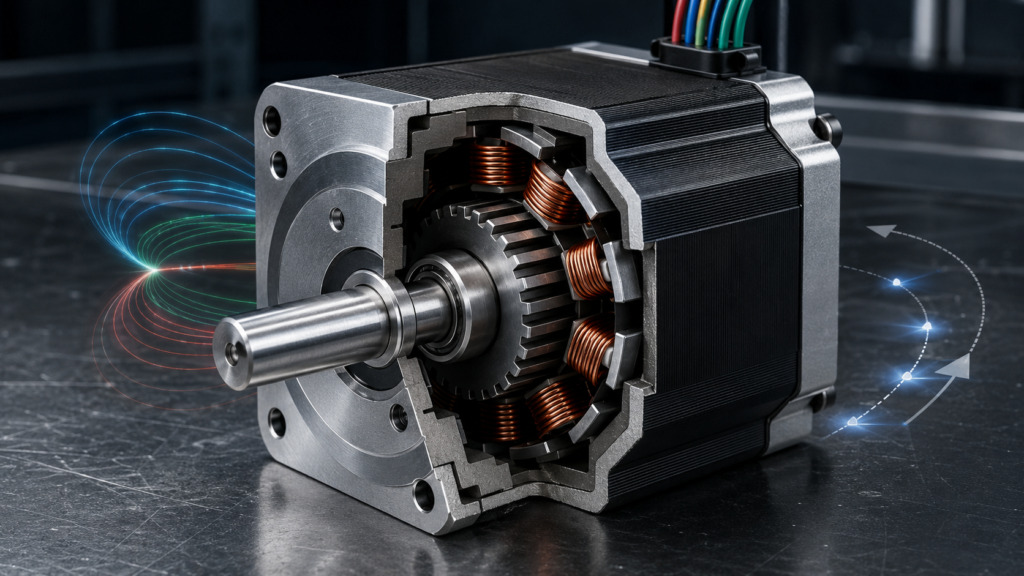
Трехфазный шаговый двигатель — это бесщеточный синхронный двигатель, преобразующий электрические импульсные сигналы в точное механическое движение. Его статор содержит трехфазные обмотки, а ротор обычно имеет конструкцию с постоянными магнитами или гибридной магнитной структурой.
В отличие от обычного трехфазного шагового двигателя, который непрерывно вращается в соответствии с вращающимся магнитным полем и условиями нагрузки, трехфазный шаговый двигатель перемещается с контролируемым угловым шагом. Это делает его подходящим для применений, требующих точного позиционирования, повторяемого регулирования скорости и надежного удерживающего момента.
Итальянский термин motore trifase обычно обозначает двигатель, работающий от трехфазной электрической системы. Однако трехфазные двигатели могут использовать различные принципы работы, включая асинхронные, синхронные и шаговые технологии.
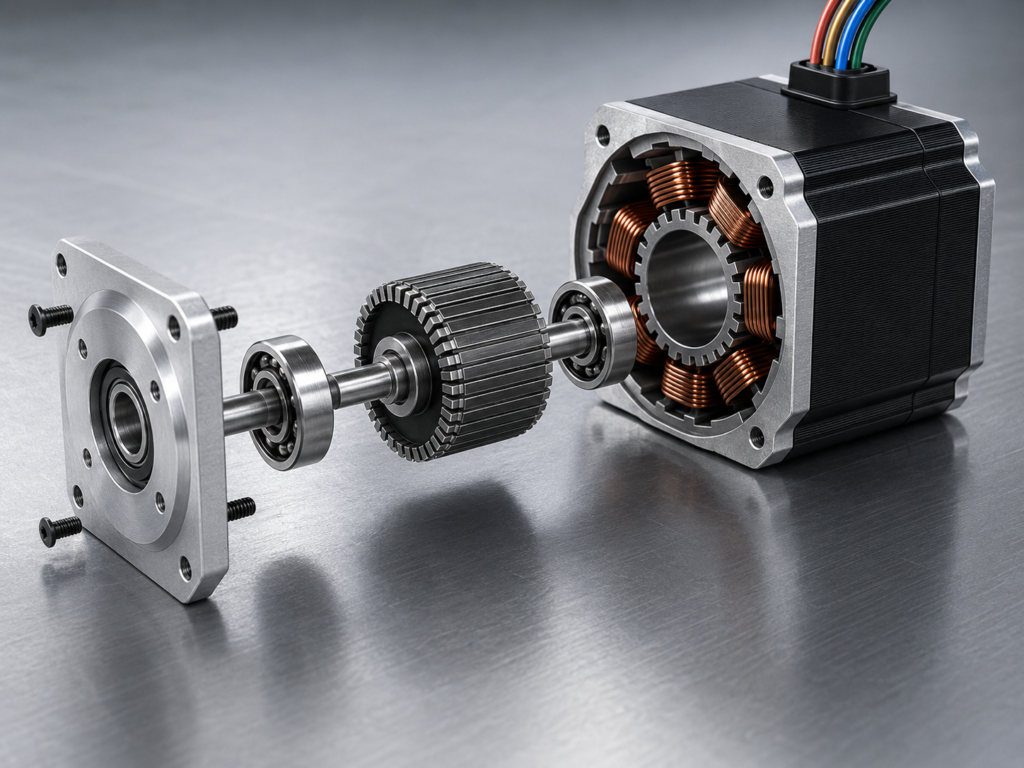
Структура трехфазного шагового двигателя
Статор двигателя состоит из магнитных полюсов и трех групп фазных обмоток. Поскольку количество полюсов статора должно соответствовать трем фазам, в распространенных конструкциях могут использоваться 3, 6, 9 или 12 основных полюсов.
В практических конструкциях электродвигателей часто используется шесть или более полюсов статора для получения следующих характеристик:
- Более сбалансированные электромагнитные силы
- Снижен уровень вибрации и механического шума.
- Более плавное движение ротора
- Улучшенное распределение крутящего момента
- Более высокая точность позиционирования
Полюса статора и ротор изготавливаются с мелкими зубьями. Взаимодействие шага зубьев статора и шага зубьев ротора обеспечивает малый угол шага и высокое угловое разрешение.
Роторные конструкции с постоянными магнитами и гибридные роторы также могут обеспечивать более высокий крутящий момент, чем традиционные конструкции с переменным магнитным сопротивлением.
Принцип работы трехфазного шагового двигателя
Основной принцип работы — последовательное фазовое возбуждение. Драйвер подает питание на три обмотки статора в заданной последовательности, создавая магнитное поле, направление которого изменяется пошагово.
Ротор выравнивается в соответствии с каждым новым положением магнитного поля. При каждом изменении последовательности возбуждения ротор перемещается на один шаг. Изменение последовательности фаз меняет направление вращения двигателя.
Скорость вращения зависит от частоты входного импульса:
- Более высокая частота импульсов приводит к более высокой скорости вращения двигателя.
- Более низкая частота импульсов приводит к более низкой скорости вращения двигателя.
- Количество импульсов определяет общий угол поворота.
- Последовательность фаз определяет направление вращения.
В драйвере обычно используется проводимость под углом 120 градусов. В течение каждого электрического интервала выбранные обмотки проводят ток и создают результирующий магнитный момент. Электронная регулировка тока может дополнительно улучшить стабильность на низких скоростях, характеристики разгона и крутящий момент на высоких скоростях.
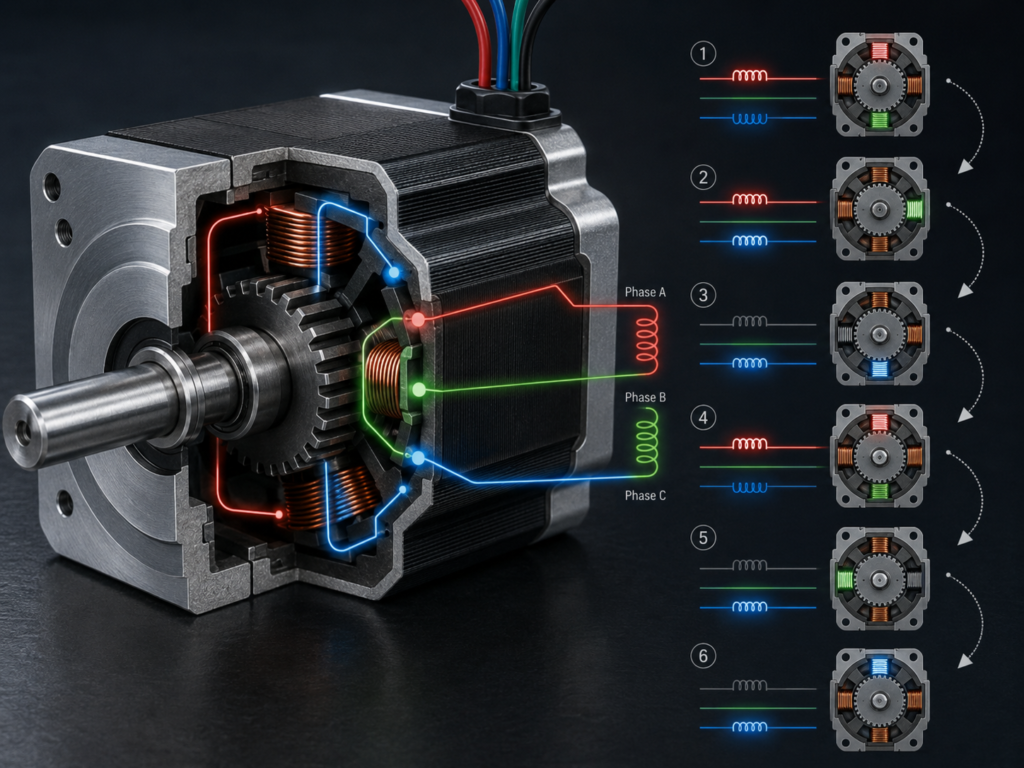
Соединения обмоток «звезда» и «треугольник»
Трехфазные обмотки обычно соединяются по схеме «звезда», также называемой «Y», или по схеме «треугольник».
Звездная связь
В звездообразном соединении в токовом пути при каждом состоянии возбуждения фактически участвуют две фазные обмотки. Поскольку обмотки работают как последовательная цепь, общая индуктивность относительно высока.
Звездное соединение предоставляет ряд преимуществ:
- Снижение требуемого тока в линии
- Хороший крутящий момент на низких оборотах
- Простая конструкция драйвера
- Плавная и стабильная работа
Однако реактивное сопротивление обмотки увеличивается со скоростью вращения. Это может ограничивать рост фазного тока и приводить к уменьшению доступного крутящего момента при более высоких скоростях вращения.
Дельта-соединение
При соединении по схеме «треугольник» обмотки образуют замкнутую треугольную цепь. Как правило, для этого требуется больший линейный ток, чем для аналогичного соединения по схеме «звезда», поэтому номинальные параметры двигателя и драйвера должны быть тщательно подобраны.
К его основным характеристикам относятся:
- Более быстрая реакция на ток обмотки
- Улучшенный крутящий момент на высоких оборотах
- Более высокая потенциальная скорость работы
- Повышенные требования к силе тока водителя
При сопоставимых условиях возбуждения требуемый ток в цепи «треугольник» может быть приблизительно в 3 раза больше соответствующего тока в цепи «звезда». Точное соотношение зависит от характеристик обмоток, приложенного напряжения, управления драйвером и конструкции двигателя.
Для применений, требующих более высокой скорости, подходящим выбором может стать трехфазный двигатель с треугольным соединением фаз.
Независимый трехфазный привод обмотки
Двигатель с шестью доступными клеммами обмоток также может использовать независимое H-образное управление. В этой конфигурации каждая обмотка получает отдельно управляемое биполярное напряжение.
Независимое управление намоткой обеспечивает большую гибкость для:
- Текущая оптимизация формы сигнала
- Микрошаг
- Высокоскоростная работа
- Контроль крутящего момента и вибрации
- Усовершенствованное управление с обратной связью
Недостатком является сложность драйвера. Для трех независимых H-мостов требуется до 12 силовых коммутирующих устройств, по сравнению с шестью устройствами во многих схемах драйверов типа «звезда» или «треугольник».
Преимущества трехфазных шаговых двигателей
По сравнению с аналогичным двухфазным шаговым двигателем, трехфазная конструкция обеспечивает:
- Более плавное создание крутящего момента
- Снижение пульсаций крутящего момента
- Снижена вибрация и уровень шума.
- Более стабильное вращение на низких скоростях
- Улучшенная динамическая реакция
- Более высокое угловое разрешение
При одинаковом количестве зубьев ротора и сопоставимой конструкции трехфазный двигатель потенциально может обеспечить примерно в 1,5 раза большее базовое разрешение, чем двухфазный двигатель.
Трехфазный драйвер также может потребовать меньшего количества силовых транзисторов, чем некоторые биполярные двухфазные решения. Это помогает упростить всю систему «двигатель-драйвер» и контролировать производственные затраты.
Трехфазный шаговый двигатель против трехфазного асинхронного двигателя
Хотя оба продукта можно охарактеризовать как трехфазный двигатель, их функции различны.
Трехфазный шаговый двигатель в основном выбирается для точного пошагового перемещения. Он может управлять положением и скоростью непосредственно с помощью управляющих импульсов и удерживать неподвижное положение во время подачи питания.
Трехфазный асинхронный двигатель (motore asincrono trifase) обычно используется для непрерывного вращения. Он широко применяется в насосах, вентиляторах, компрессорах, конвейерах и промышленном оборудовании.
Если важны точность и повторяемость позиционирования, выбирайте трехфазный шаговый двигатель. Если же основными требованиями являются непрерывная работа, долговечность и высокая выходная мощность, выбирайте трехфазный асинхронный двигатель.
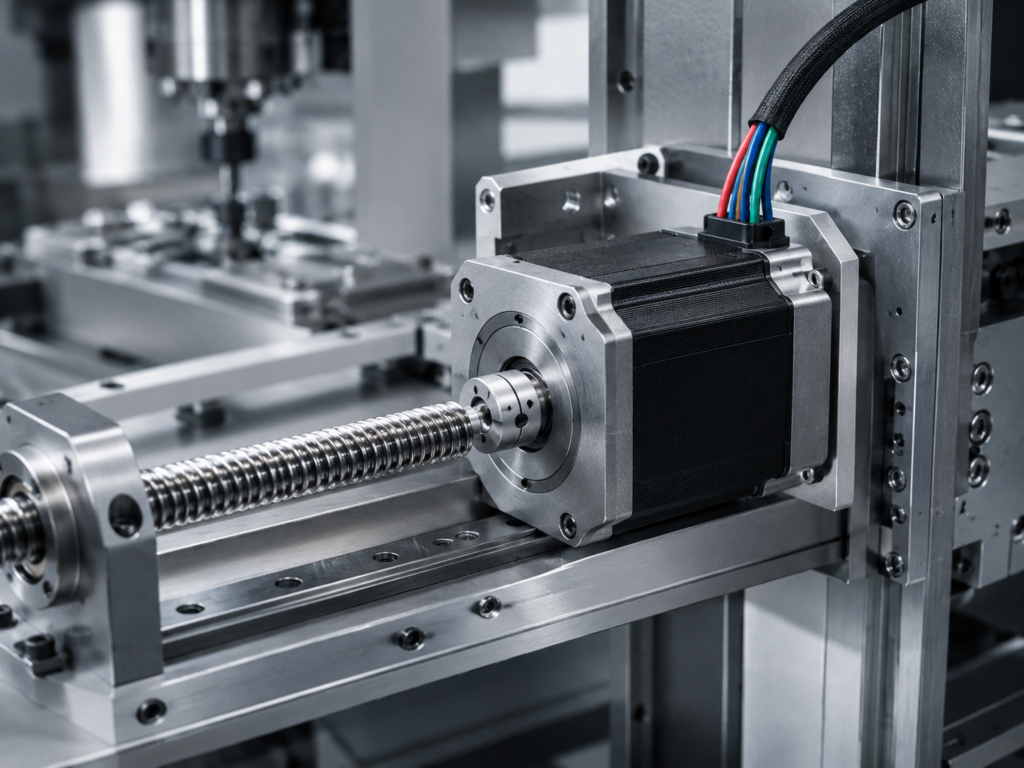
Типичные области применения
Трехфазные шаговые двигатели широко используются в:
- Станки с ЧПУ
- Промышленные роботы
- Упаковочное оборудование
- Текстильное оборудование
- Медицинские устройства
- Полупроводниковое оборудование
- Системы точного позиционирования
- Автоматизированные производственные линии
Соответствующее соединение и драйвер следует выбирать в зависимости от требуемого крутящего момента, скорости, тока, напряжения и рабочего цикла.
Заключение
Трехфазный шаговый двигатель работает за счет последовательного включения трех обмоток статора для создания управляемого вращающегося магнитного поля. Его мелкозубчатая конструкция статора и ротора обеспечивает точное пошаговое движение, плавную работу и низкий уровень вибрации.
Звездное соединение часто предпочтительнее для обеспечения низкого тока и высокой производительности на низких скоростях, в то время как треугольное соединение может обеспечить лучший крутящий момент на более высоких скоростях. Независимое управление обмотками обеспечивает наибольшую гибкость, но требует более сложного драйвера.
Как профессиональный производитель и поставщик электродвигателей, мы предлагаем решения для систем позиционирования и систем непрерывного промышленного привода. Свяжитесь с нами, указав напряжение, скорость, крутящий момент, габариты установки и требования к управлению, и наша команда инженеров поможет вам выбрать подходящий двигатель.