
- Home
- Product
- GOST standard motor
- IEC standard motor
 MC Series single phase capacitor start asynchronous motor
MC Series single phase capacitor start asynchronous motor- MY MYT series single phase capacitor running asynchronous motor
- ML Series single phase dual-capacitor asynchronous motor
- ME2 series three phase high efficiency aluminum housing motor(IE2)
- ME3 series three phase high efficiency aluminum housing motor(IE3)
- MS series three-phase aluminum housing motor (IE1)
- Y2 series three phase cast iron motor (IE1)
- YE2 series three phase high efficiency cast iron motor (IE2)
- YE3 series three phase high efficiency cast iron motor (IE3)
- Special application motor
- Rolling door motor
- Industry application
- News
- About us
- Contact us
- Certifications













How Does a Three-Phase Stepper Motor Work?
What Is a Three-Phase Stepper Motor?
A three-phase stepper motor is a brushless synchronous motor that converts electrical pulse signals into precise mechanical movement. Its stator contains three-phase windings, while the rotor is usually designed with permanent magnets or a hybrid magnetic structure.
Unlike a conventional motore asincrono trifase, which rotates continuously according to the rotating magnetic field and load conditions, a three-phase stepper motor moves through controlled angular steps. This makes it suitable for applications requiring accurate positioning, repeatable speed control, and reliable holding torque.
The Italian term motore trifase generally refers to a motor powered by a three-phase electrical system. However, three-phase motors may use different operating principles, including induction, synchronous, and stepper technologies.
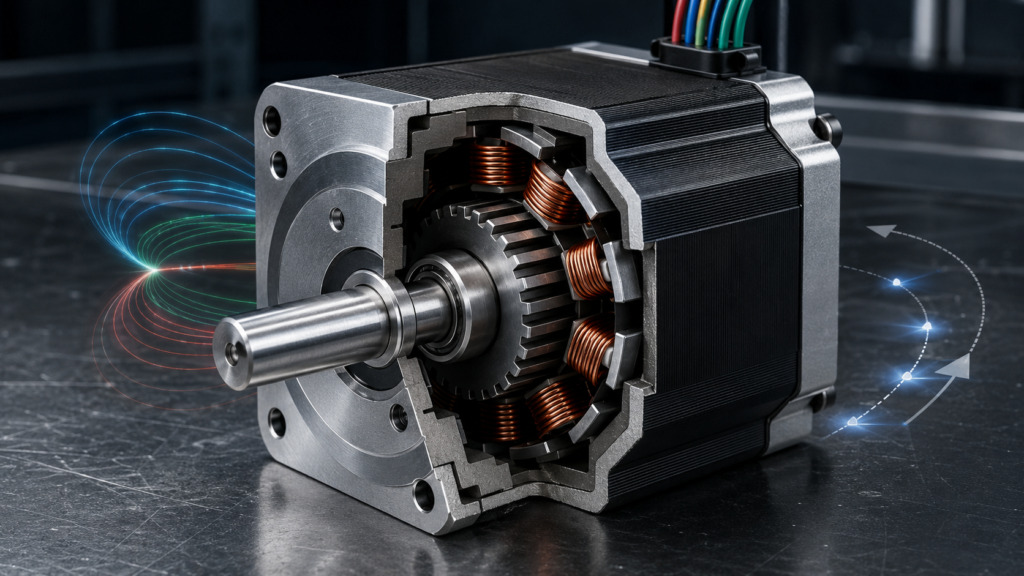
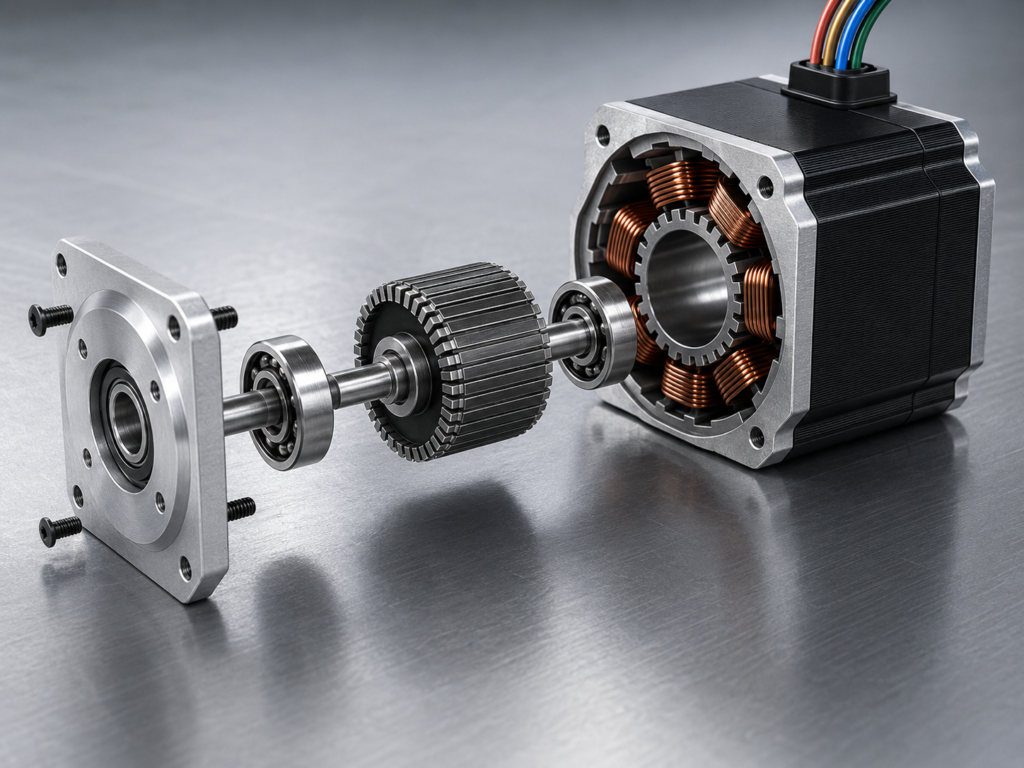
Three-Phase Stepper Motor Structure
The stator of the motor consists of magnetic poles and three groups of phase windings. Because the number of stator poles must correspond to the three phases, common designs may use 3, 6, 9, or 12 main poles.
In practical motor designs, six or more stator poles are often used to obtain:
- More balanced electromagnetic forces
- Lower vibration and mechanical noise
- Smoother rotor movement
- Better torque distribution
- Higher positioning accuracy
The stator poles and rotor are manufactured with fine teeth. The interaction between the stator tooth pitch and rotor tooth pitch produces a small step angle and high angular resolution.
Permanent-magnet and hybrid rotor structures can also provide higher torque than traditional variable-reluctance designs.
Three-Phase Stepper Motor Working Principle
The basic operating principle is sequential phase excitation. A driver energizes the three stator windings in a predefined order, generating a magnetic field whose direction changes step by step.
The rotor aligns itself with each new magnetic field position. Every time the excitation sequence advances, the rotor moves by one step. Reversing the phase sequence reverses the motor’s direction.
The rotational speed depends on the input pulse frequency:
- A higher pulse frequency produces a higher motor speed.
- A lower pulse frequency produces a lower motor speed.
- The number of pulses determines the total rotation angle.
- The phase sequence determines the direction of rotation.
The driver commonly uses 120-degree conduction. During each electrical interval, selected windings conduct current and create a resultant magnetic torque. Electronic current regulation can further improve low-speed stability, acceleration performance, and high-speed torque.
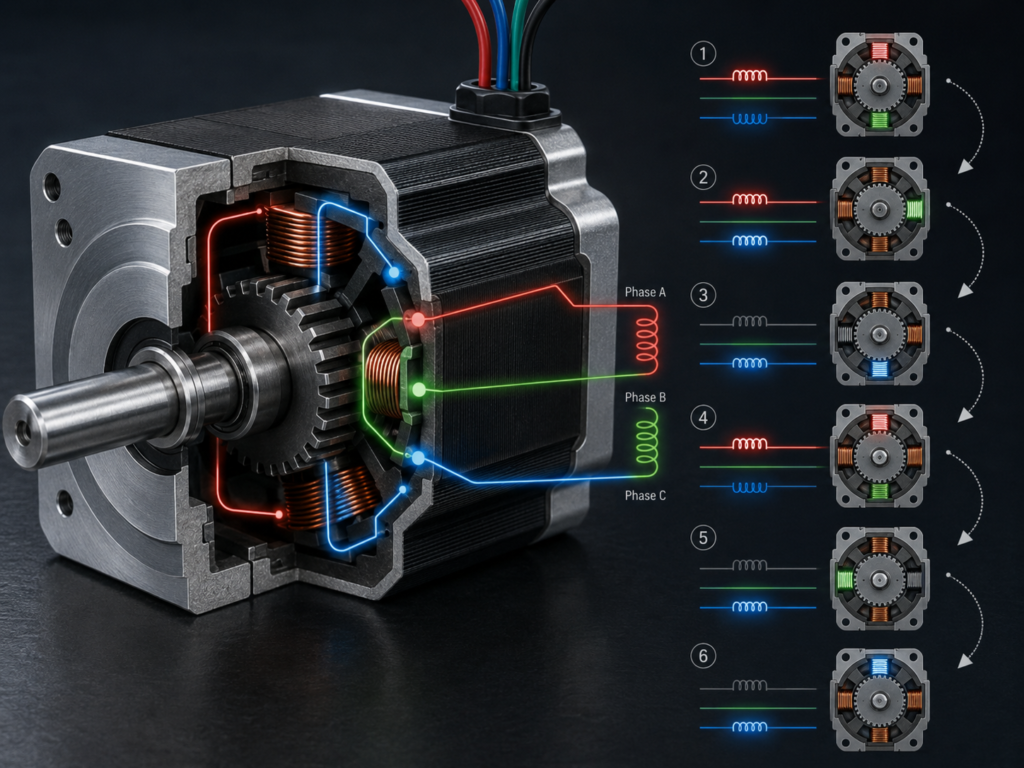
Star and Delta Winding Connections
The three phase windings can normally be connected using a star, also called Y, connection or a delta connection.
Star Connection
In a star connection, two phase windings are effectively involved in the current path during each excitation state. Because the windings behave as a series circuit, the total inductance is relatively high.
The star connection offers several advantages:
- Lower required line current
- Good low-speed torque
- Simple driver construction
- Smooth and stable operation
However, winding reactance increases with speed. This can limit phase-current rise and cause the available torque to decrease at higher rotational speeds.
Delta Connection
In a delta connection, the windings form a closed triangular circuit. It generally requires a higher line current than a comparable star connection, so the motor and driver ratings must be matched carefully.
Its main characteristics include:
- Faster winding-current response
- Better high-speed torque
- Higher potential operating speed
- Higher driver-current requirements
Under comparable excitation conditions, the required delta line current may be approximately √3 times the corresponding star current. The exact relationship depends on winding specifications, applied voltage, driver control, and motor design.
For applications requiring higher speed, a delta-connected three phase motor can therefore be a suitable choice.
Independent Three-Phase Winding Drive
A motor with six accessible winding terminals can also use independent H-bridge control. In this configuration, each winding receives a separately controlled bipolar voltage.
Independent winding control provides greater flexibility for:
- Current waveform optimization
- Microstepping
- High-speed operation
- Torque and vibration control
- Advanced closed-loop control
The disadvantage is driver complexity. Three independent H-bridges require up to 12 power-switching devices, compared with six devices in many star or delta driver circuits.
Advantages of Three-Phase Stepper Motors
Compared with a similar two-phase stepper motor, a three-phase design can provide:
- Smoother torque production
- Lower torque ripple
- Reduced vibration and audible noise
- More stable low-speed rotation
- Improved dynamic response
- Higher angular resolution
With the same rotor tooth count and comparable construction, a three-phase design can potentially provide approximately 1.5 times the basic resolution of a two-phase motor.
A three-phase driver may also require fewer power transistors than some bipolar two-phase solutions. This helps simplify the complete motor-and-driver system while controlling manufacturing costs.
Three-Phase Stepper Motor vs. Three-Phase Induction Motor
Although both products may be described as a motore trifase, their functions are different.
A three-phase stepper motor is mainly selected for precise incremental movement. It can control position and speed directly through command pulses and may hold a stationary position while energized.
A motore asincrono trifase, or three-phase asynchronous induction motor, is generally used for continuous rotary power. It is commonly found in pumps, fans, compressors, conveyors, and industrial machinery.
Choose a three-phase stepper motor when positioning accuracy and repeatability are important. Choose a three-phase induction motor when continuous operation, durability, and high output power are the primary requirements.
Typical Applications
Three-phase stepper motors are widely used in:
- CNC machines
- Industrial robots
- Packaging equipment
- Textile machinery
- Medical devices
- Semiconductor equipment
- Precision positioning systems
- Automated production lines
The appropriate connection and driver should be selected according to the required torque, speed, current, voltage, and operating cycle.
Conclusion
A three-phase stepper motor operates by energizing three stator windings in sequence to produce a controlled rotating magnetic field. Its fine-tooth stator and rotor structure delivers accurate step movement, smooth operation, and low vibration.
Star connection is often preferred for lower current and strong low-speed performance, while delta connection can provide better torque at higher speeds. Independent winding control offers the greatest flexibility but requires a more complex driver.
As a professional motor manufacturer and supplier, we provide motor solutions for positioning systems and continuous industrial drive applications. Contact us with your voltage, speed, torque, installation size, and control requirements, and our engineering team will help you select the right motor.