
- Startseite
- Produkt
- GOST-Standardmotor
- IEC-Standardmotor
 MC-Serie Einphasen-Kondensator-Anlauf-Asynchronmotor
MC-Serie Einphasen-Kondensator-Anlauf-Asynchronmotor- MY/MYT-Serie Einphasen-Kondensatorlauf-Asynchronmotor
- ML-Serie Einphasen-Asynchronmotor mit Doppelkondensator
- ME2-Serie hocheffizienter Drehstrommotor mit Aluminiumgehäuse (IE2)
- ME3-Serie hocheffizienter Drehstrommotor mit Aluminiumgehäuse (IE3)
- MS-Serie Drehstrommotor mit Aluminiumgehäuse (IE1)
- Y2-Serie Drehstrommotor mit Gusseisengehäuse (IE1)
- YE2-Serie hocheffizienter Drehstrommotor mit Gusseisengehäuse (IE2)
- YE3-Serie hocheffizienter Drehstrommotor mit Gusseisengehäuse (IE3)
- Spezialmotor für Sonderanwendungen
- Rolltorantrieb
- Industrieanwendung
- Nachrichten
- Über uns
- Kontaktieren Sie uns














Servomotoren vs. Induktionsmotoren
In der industriellen Automatisierung, der intelligenten Fertigung und verschiedenen Antriebsanwendungen bestimmen Motoren als Kernkomponenten zur Umwandlung elektrischer in mechanische Energie maßgeblich die Betriebsgenauigkeit, Effizienz und Stabilität der Anlagen. Servomotoren und Induktionsmotoren sind die beiden am weitesten verbreiteten Motortypen und dominieren die Bereiche der hochpräzisen Steuerung bzw. der universellen Antriebstechnik. Servomotoren zeichnen sich durch präzise Steuerbarkeit aus und werden in der High-End-Fertigung kontinuierlich weiterentwickelt. Induktionsmotoren hingegen überzeugen durch Stabilität, Zuverlässigkeit und Wirtschaftlichkeit und sind somit die Basis für die Energieversorgung in der industriellen Produktion und in zivilen Anwendungen. Dieser Artikel analysiert umfassend die Unterschiede und Zusammenhänge zwischen den beiden Motortypen hinsichtlich Struktur, Funktionsprinzip, Kerneigenschaften, Anwendungsbereichen und Auswahlkriterien und bietet somit eine Orientierungshilfe für die praktische Anwendung.
1. Kernpositionierung und Klassifizierung von Motoren – Überblick
Ein Motor ist ein elektromagnetisches Gerät, das elektrische Energie nach dem Gesetz der elektromagnetischen Induktion in mechanische Energie umwandelt. Je nach Anwendungsbereich lassen sich Motoren in Antriebsmotoren und Stellmotoren unterteilen. Induktionsmotoren gehören zu den Antriebsmotoren. Ihre Hauptfunktion besteht in der Umwandlung elektrischer in mechanische Energie, um verschiedene Geräte kontinuierlich und stabil mit Strom zu versorgen. Induktionsmotoren finden heute breite Anwendung in allgemeinen Maschinen, Haushaltsgeräten und Energiesystemen. Servomotoren hingegen gehören zu den Stellmotoren. Ihre Hauptfunktion ist die präzise Regelung von Position, Drehzahl und Drehmoment im geschlossenen Regelkreis durch Steuersignale. Sie sind Bestandteil von Automatisierungsanlagen und zentrale Aktuatoren in Präzisionsfertigungsanlagen.
Aus anwendungstechnischer Sicht haben Induktionsmotoren mit ihren Vorteilen wie einfacher Bauweise und hoher Zuverlässigkeit nach und nach über 70 % Marktanteil im globalen Industriemotorenmarkt erobert und sich zur wichtigsten Antriebsquelle in der industriellen Produktion entwickelt. Servomotoren finden mit der steigenden Nachfrage nach modernisierter Industrieautomatisierung zunehmend Anwendung und werden in High-End-Werkzeugmaschinen und Industrierobotern immer häufiger eingesetzt. Sie gelten als wichtiger Indikator für Fertigungskompetenz. Die beiden Motortypen haben unterschiedliche Anwendungsbereiche, ergänzen sich jedoch und decken gemeinsam die vielfältigen Bedürfnisse der industriellen Produktion ab.
2. Strukturelle Unterschiede zwischen Servomotoren und Induktionsmotoren
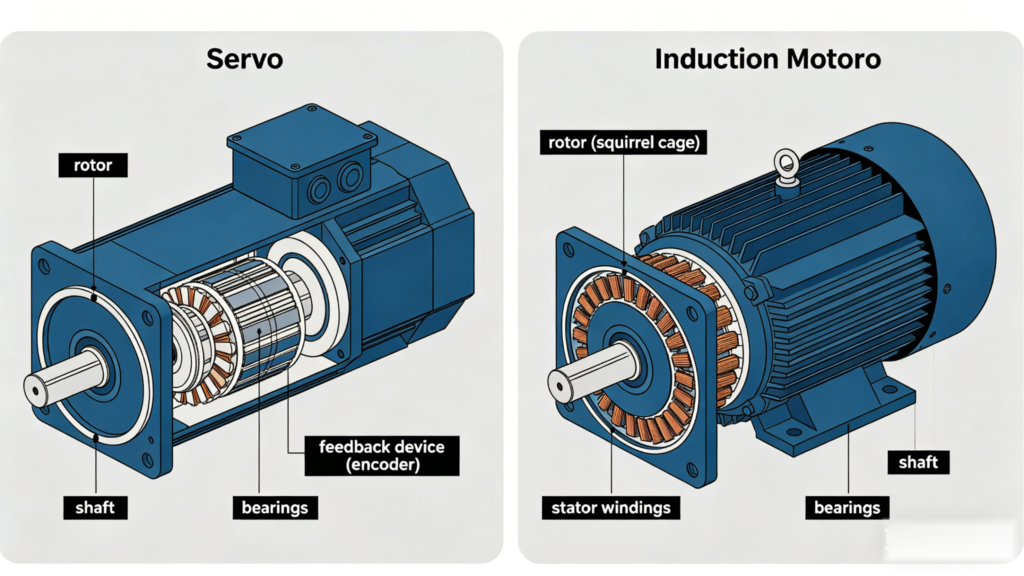
Bekanntlich führen unterschiedliche Motorstrukturen zu unterschiedlichen Motorleistungen. Obwohl beide Motortypen aus grundlegenden Komponenten wie Stator, Rotor, Gehäuse und Lager bestehen, unterscheiden sich Konstruktion, Material und Funktion ihrer Kernkomponenten erheblich, was die Hauptursache für die Leistungsunterschiede ist.
2.1 Struktureller Aufbau von Servomotoren
Ein Servomotor ist ein komplettes Steuerungssystem. Neben dem Motorgehäuse kann er hochpräzise Rückkopplungselemente integrieren und benötigt einen speziellen Servotreiber, um eine präzise Steuerung aller drei Komponenten zu gewährleisten.
Die erste Komponente ist der Motorkörper. Der Stator besteht aus mehreren Lagen isolierter Siliziumstahlbleche mit eingebetteten Dreiphasenwicklungen. Durch Anlegen von Wechselstrom wird ein rotierendes Magnetfeld erzeugt. Der Rotor verwendet typischerweise Neodym-Eisen-Bor-Permanentmagnete, die in einer bestimmten Anzahl von Polpaaren angeordnet sind, um die Effizienz und Reaktionsgeschwindigkeit zu verbessern. Das Gehäuse ist abgedichtet und sorgt für ein ausgewogenes Verhältnis von Wärmeableitung, Vibrationsfestigkeit und Abdichtung, sodass es für komplexe Industrieumgebungen geeignet ist.
Die zweite Komponente ist das Rückkopplungselement, das „Auge“ des Motors. Es erfasst Position und Drehzahl des Rotors in Echtzeit und meldet diese Informationen an den Treiber zurück. Inkrementalgeber bestimmen die Position anhand der Impulsanzahl, benötigen aber einen Referenzpunkt; Absolutwertgeber geben direkt einen eindeutigen Positionscode aus, der auch nach einem Stromausfall erhalten bleibt. Hochpräzise Systeme verwenden meist 17-Bit- oder höherwertige Modelle und erreichen so eine Positionierung im Nanometerbereich.
Die dritte Komponente ist der Servotreiber, der als zentrale Steuereinheit fungiert und aus einer digitalen Signalverarbeitungseinheit (DSP) und einem Leistungswandlermodul besteht. Er empfängt primär Anweisungen vom Host-Computer und gibt Rückmeldung vom Encoder. Mithilfe eines dreifachen Regelkreises passt er Ausgangsspannung und -strom an und gewährleistet so einen präzisen Motorbetrieb. Zudem integriert er Schutzfunktionen gegen Überspannung und Überstrom.
2.2 Struktureller Aufbau von Induktionsmotoren
Induktionsmotoren zeichnen sich durch einen relativ einfachen Aufbau aus. Sie benötigen weder Rückkopplungselemente noch spezielle Treiber; die Kernkomponenten bestehen lediglich aus Stator, Rotor und Gehäuse. Bei der Konstruktion stehen Einfachheit und Robustheit im Vordergrund.
Zunächst zum Stator. Sein Aufbau ähnelt dem eines Servomotorstators, die Wicklungskonstruktion ist jedoch stärker auf Leistungseffizienz ausgelegt. Drahtdurchmesser und Windungszahl sind entsprechend der Nennleistung dimensioniert, um einen langfristigen Betriebsstabilität zu gewährleisten.
Zweitens gibt es den Rotor, der in Kurzschlussläufer und Schleifringläufer unterteilt werden kann. Der Kurzschlussläufer ist am weitesten verbreitet; er besteht aus Führungsstäben und ringförmigen Endringen und wird im Aluminiumgussverfahren hergestellt, was zu einer einfachen Konstruktion und einer relativ geringen Ausfallrate führt. Beim Schleifringläufer werden die Rotorwicklungen über Schleifringe und Bürsten nach außen geführt, und durch den Anschluss von Widerständen lassen sich das Anlaufverhalten und die Drehzahlregelung verbessern. Er eignet sich für Anwendungen mit hoher Leistung und häufigen Anläufen.
Schließlich gibt es noch Hilfskomponenten. Das Gehäuse besteht größtenteils aus Gusseisen und bietet eine hervorragende Wärmeableitung. Verschleißfeste Rillenkugellager erleichtern die Wartung. Hochleistungsmodelle können mit Lüftern ausgestattet werden, um die Wärmeableitung auch unter hoher Last zu gewährleisten. Die einfache Konstruktion bietet Vorteile hinsichtlich Kosten und Zuverlässigkeit.
2.3 Zusammenfassung der wichtigsten strukturellen Unterschiede
Servomotoren nutzen eine Regelungstechnik, was zu einer komplexen und kostspieligen Konstruktion führt. Induktionsmotoren hingegen zeichnen sich durch Einfachheit und Zuverlässigkeit aus und benötigen weder Rückkopplungselemente noch spezielle Treiber. Dies resultiert in einer einfacheren Konstruktion und geringeren Kosten. Dieser Unterschied wirkt sich direkt auf die Regelungsgenauigkeit und die Reaktionsgeschwindigkeit beider Motorenarten aus.
3. Unterschiede in den Funktionsprinzipien von Servomotoren und Induktionsmotoren
Beide Motortypen arbeiten nach dem Gesetz der elektromagnetischen Induktion, aber ihre unterschiedlichen Strukturen führen zu grundlegenden Unterschieden bei den Energieumwandlungsmethoden und der Steuerungslogik: Induktionsmotoren erreichen eine einfache Umwandlung von elektrischer Energie in mechanische Energie, die keine präzise Steuerung erfordert; Servomotoren hingegen erreichen eine präzise Bewegungssteuerung durch geschlossene Rückkopplungsschleifen.
3.1 Funktionsprinzip von Servomotoren
Servomotoren werden im Wesentlichen durch elektromagnetische Induktion unter Regelung angetrieben. Der Kernmechanismus eliminiert Fehler durch eine dreifache Regelung in vier Schritten: Erstens empfängt und verarbeitet der Treiber Steuerbefehle vom Host-Rechner. Zweitens wird ein spezifischer Wechselstrom an die Statorwicklungen angelegt, wodurch ein rotierendes Magnetfeld erzeugt wird, das den Permanentmagneten des Rotors in Rotation versetzt. Drittens erfasst der Encoder die aktuellen Betriebsparameter und gibt sie zurück. Viertens passt der Treiber die Ausgangsleistung anhand des Fehlers an und korrigiert so den Betriebszustand des Rotors. Die Ansprechzeit beim Starten und Stoppen liegt im Millisekundenbereich, und die Überlastfähigkeit erreicht das Dreifache des Nenndrehmoments. Damit erfüllt der Motor die Anforderungen an Hochgeschwindigkeits- und Hochpräzisionssteuerung.
3.2 Funktionsprinzip von Induktionsmotoren
Induktionsmotoren arbeiten im offenen Regelkreis mittels elektromagnetischer Induktion: An die dreiphasigen Statorwicklungen wird Wechselstrom angelegt, um ein synchron rotierendes Magnetfeld zu erzeugen. Die Rotorleiter induzieren durch ihre Relativbewegung zum Magnetfeld einen Strom, der durch die elektromagnetische Kraft zur Rotation angeregt wird. Der Schlupf ist ihr wichtigstes Merkmal. Im Normalbetrieb liegt der Schlupf zwischen 0,01 und 0,05, wodurch die Drehzahl lastabhängig schwankt. Daher ist die Drehzahlregelung ungenau. In Kombination mit einem Frequenzumrichter lässt sich zwar eine stufenlose Drehzahlregelung realisieren, die Genauigkeit ist jedoch deutlich geringer als die eines Servomotors, und Wirkungsgrad und Leistungsfaktor sind bei geringer Last niedrig.
3.3 Zusammenfassung der wichtigsten Unterschiede in den Arbeitsprinzipien
Servomotoren sind Antriebe mit geschlossenem Regelkreis und Echtzeit-Fehlerkorrektur; Induktionsmotoren hingegen sind Antriebe mit offenem Regelkreis, die lediglich Leistung abgeben. Diese Unterschiede in ihren Funktionsprinzipien bedingen ihre unterschiedlichen Einsatzgebiete.
4. Vergleich der Kernmerkmale von Servomotoren und Induktionsmotoren
Aufgrund von Unterschieden in Aufbau und Funktionsprinzip weisen Servomotoren und Induktionsmotoren signifikante Unterschiede in ihren Kerneigenschaften auf, die direkt ihre Anwendungsbereiche bestimmen. Ein konkreter Vergleich folgt:
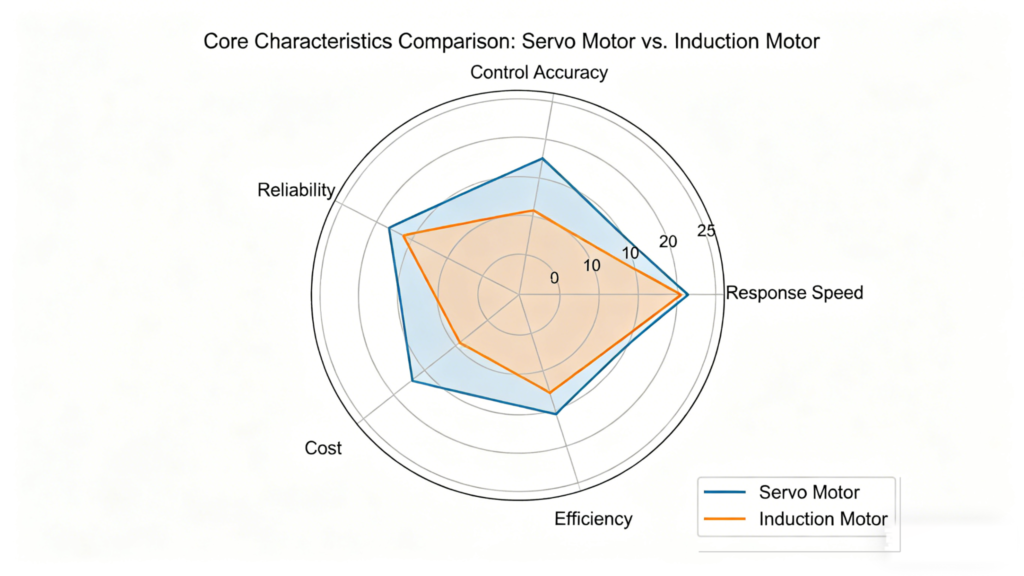
4.1 Regelgenauigkeit
Servomotoren zeichnen sich durch eine sehr hohe Genauigkeit aus, die durch die Encoderauflösung bestimmt wird. Sie ermöglichen eine Positionierung im Nanometerbereich und eine präzise Drehzahlregelung unter 0,1 U/min. Durch die dreifache Regelung mit geschlossenen Regelkreisen werden Fehler eliminiert, wodurch sie sich für verschiedene Anwendungsbereiche wie die Präzisionsmontage eignen. Induktionsmotoren hingegen arbeiten mit offener Regelung und erreichen eine Drehzahlgenauigkeit von lediglich ±1 % bis ±5 %. Selbst mit einem Frequenzumrichter beträgt die Genauigkeit nur ±0,5 %, was hohen Präzisionsanforderungen nicht genügt.
4.2 Reaktionsgeschwindigkeit
Servomotoren zeichnen sich durch eine Ansprechzeit von 10–50 Millisekunden, ein exzellentes Beschleunigungsverhalten und ihre Eignung für Anwendungen mit hohen Drehzahlen und häufigen Start-Stopp-Zyklen aus. Induktionsmotoren hingegen benötigen zum Anlaufen eine erhebliche Trägheit und reagieren daher erst nach mehreren Sekunden. Aus diesem Grund eignen sie sich für den Dauerbetrieb ohne häufige Start-Stopp-Zyklen.
4.3 Effizienz und Energieverbrauch
Servomotoren erreichen einen Wirkungsgrad zwischen 90 % und 98 % und behalten diesen hohen Wirkungsgrad auch bei geringer Last bei. Ihr Leistungsfaktor liegt nahe bei 1, was zu einem niedrigen Energieverbrauch führt. Induktionsmotoren weisen einen Wirkungsgrad zwischen 75 % und 90 % auf, der jedoch bei geringer Last deutlich sinkt. Ihr Leistungsfaktor liegt zwischen 0,7 und 0,9. Unter Nennlast ist der Unterschied im Energieverbrauch zwischen Servomotoren und Induktionsmotoren nicht signifikant.
4.4 Kosten und Wartung
Servomotoren sind drei- bis fünfmal so teuer wie Induktionsmotoren gleicher Leistung. Der Encoder und der Treiber machen einen Großteil der Kosten aus, was die Wartung komplexer gestaltet und regelmäßige Kalibrierungen durch Fachleute erfordert. Induktionsmotoren kosten hingegen nur ein Drittel bis ein Fünftel, haben einen einfachen Aufbau, eine geringe Ausfallrate und benötigen lediglich regelmäßige Kontrollen der Schmierung und Wärmeableitung, was zu extrem niedrigen Wartungskosten führt.
4.5 Zuverlässigkeit und Anpassungsfähigkeit an die Umwelt
Servomotoren weisen eine komplexere Struktur auf und ihre Präzisionsbauteile unterliegen hohen Anforderungen an die Umgebungsbedingungen, da sie anfällig für hohe Temperaturen, Staub und Vibrationen sind. Induktionsmotoren hingegen sind robuster, benötigen weniger Präzisionsbauteile und eignen sich für raue Industrieumgebungen, was zu einer geringeren Ausfallrate im Langzeitbetrieb führt.
4.6 Lastcharakteristika
Servomotoren zeichnen sich durch eine hohe Überlastfähigkeit aus und eignen sich daher für Anwendungen mit starken Lastschwankungen und häufigen Beschleunigungs-/Verzögerungsvorgängen. Induktionsmotoren hingegen haben eine geringere Überlastfähigkeit und eignen sich daher für Anwendungen mit konstanter Last ohne starke Stöße.
5. Anwendungsszenarien von Servomotoren und Induktionsmotoren
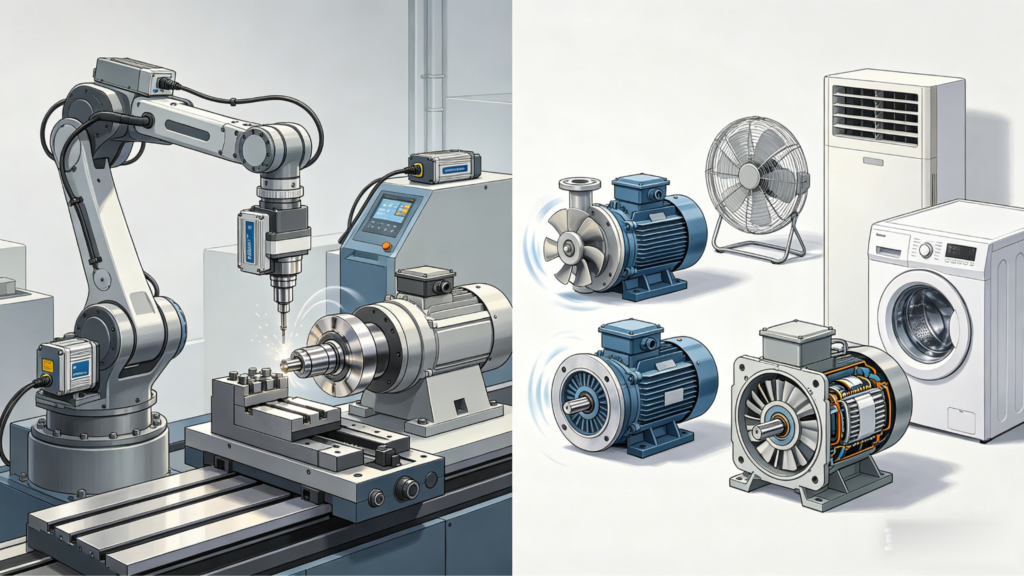
5.1 Typische Anwendungsszenarien von Servomotoren
Servomotoren zeichnen sich durch hohe Präzision, schnelles Ansprechverhalten und hohe Überlastfähigkeit aus und werden vorwiegend in der High-End-Fertigung und Automatisierung eingesetzt: Industrieroboter, CNC-Werkzeugmaschinen, Halbleiteranlagen, Elektronikfertigungsanlagen und Anlagen für erneuerbare Energien. Sie finden auch Verwendung in Präzisionsinstrumenten und Medizingeräten.
5.2 Typische Anwendungsszenarien von Induktionsmotoren
Induktionsmotoren werden aufgrund ihrer Einfachheit, Zuverlässigkeit und hohen Wirtschaftlichkeit in vielen Bereichen der Energieversorgung eingesetzt: in industriellen Anlagen (Pumpen, Ventilatoren, Förderbänder usw., die als grundlegende Energiequellen dienen), in Haushaltsgeräten (Waschmaschinen, Klimaanlagen usw., die den täglichen Energiebedarf decken), in Stromversorgungssystemen und im Schienenverkehr (Lüfter usw., die für hohe Leistungsanforderungen geeignet sind) sowie in Landmaschinen (Traktoren, Wasserpumpen usw., die auch unter rauen Umgebungsbedingungen zuverlässig funktionieren). Auch das Antriebssystem des Tesla Model S/X nutzt Induktionsmotoren und erweitert damit dessen Einsatzmöglichkeiten im High-End-Bereich.
6. Auswahlkriterien und Überlegungen für Servomotoren und Induktionsmotoren
6.1 Kernauswahlprinzipien
- Bei der Steuerungspräzision: Wählen Sie einen Servomotor für die präzise Steuerung und einen Induktionsmotor nur für den Antriebsvorgang.
- Nach Lastcharakteristik: Wählen Sie einen Servomotor für große Lastschwankungen und häufige Start-Stopp-Vorgänge und einen Induktionsmotor für konstante Lasten und Langzeitbetrieb.
- Nach Kostenbudget: Wählen Sie einen Servomotor für ausreichendes Budget und hohe Präzision und einen Induktionsmotor für begrenztes Budget und hohe Zuverlässigkeit, wobei Sie auch den langfristigen Energieverbrauch berücksichtigen sollten.
- Je nach Umgebungsbedingungen: Wählen Sie einen Induktionsmotor für raue Umgebungen und einen Servomotor mit entsprechendem Schutz für saubere, hochpräzise Anwendungen.
6.2 Auswahlkriterien
Bei der Auswahl eines Servomotors müssen die Steuerungsanforderungen klar definiert, die Genauigkeit von Encoder und Treiber aufeinander abgestimmt und das Lastträgheitsverhältnis berücksichtigt werden. Die Auswahl eines Induktionsmotors erfordert die Bestimmung der Leistung und Polzahl, die Auswahl des Umrichters entsprechend den spezifischen Anforderungen, die Priorisierung von Hocheffizienzklassen wie IE3/IE4 und die fachgerechte Installation gemäß den Kundenvorgaben.
7. Branchenentwicklungstrends und Zukunftsaussichten
Mit der Förderung der industriellen Automatisierung sowie energiesparender und umweltschonender Maßnahmen streben beide Motortypen nach höherer Präzision, Effizienz und Intelligenz. Servomotoren zeichnen sich durch hohe Präzision, schnelles Ansprechverhalten, Miniaturisierung, geringes Gewicht und intelligente Energieeinsparung aus. Durch die Kombination von KI und Mehrachsen-Synchronisationstechnologie erschließen sie sich auch anspruchsvollere Anwendungen. Induktionsmotoren hingegen setzen auf verbesserte Energieeffizienz, intelligentere Weiterentwicklungen und spezialisierte Entwicklungen, wodurch sie sich flexibel an die Bedürfnisse verschiedener Branchen anpassen können. Gleichzeitig vereinen integrierte Produkte wie Servo- und Induktionsmotoren die Vorteile beider Typen und erschließen sich auch mittlere Anwendungsbereiche.
8. Schlussfolgerung
Servomotoren und Induktionsmotoren haben jeweils ihre Vorteile. Servomotoren ermöglichen eine präzise Steuerung und unterstützen so die High-End-Fertigung, während Induktionsmotoren eine stabile und kostengünstige Stromversorgung für allgemeine Anwendungen bieten. In der Praxis sollten wir die Auswahl anhand von Regelungsgenauigkeit, Lastcharakteristik, Kostenbudget und Umgebungsbedingungen sorgfältig treffen. Zukünftig werden Servomotoren und Induktionsmotoren kontinuierlich optimiert und weiterentwickelt, um die industrielle Automatisierung und intelligente Fertigung mit noch leistungsfähigerem Antrieb zu unterstützen und Anlagen in Richtung höherer Effizienz, Präzision und Zuverlässigkeit zu treiben.