
- Casa
- Prodotto
- Motore standard GOST
- Motore standard IEC
 Motore asincrono monofase serie MY/MYT con condensatore di marcia
Motore asincrono monofase serie MY/MYT con condensatore di marcia- Motore asincrono monofase serie ML con doppio condensatore
- Motore trifase ad alta efficienza serie ME2 con carcassa in alluminio
- Motore trifase ad alta efficienza serie ME3 con carcassa in alluminio
- Motore trifase ad alta efficienza serie YE2 con carcassa in ghisa (IE2)
- Motore trifase ad alta efficienza serie YE3 con carcassa in ghisa (IE3)
- Motore asincrono monofase serie MC con avviamento a condensatore
- Motore trifase serie MS con carcassa in alluminio (IE1)
- Motore trifase serie Y2 con carcassa in ghisa (IE1)
- Motore per applicazioni speciali
- Motore per porta avvolgibile
- Applicazione industriale
- Notizie
- Chi siamo
- Contattaci














Servomotori contro motori a induzione
Nell’automazione industriale, nella produzione intelligente e in diversi scenari di azionamento di potenza, i motori, in quanto componenti fondamentali per la conversione dell’energia elettrica in energia meccanica, determinano direttamente la precisione, l’efficienza e la stabilità operativa delle apparecchiature. I servomotori e i motori a induzione sono i due tipi di motori più diffusi, dominando rispettivamente i settori del controllo di alta precisione e dell’azionamento di potenza per uso generale. I servomotori privilegiano la precisione di controllo, seguendo un percorso di sviluppo raffinato nella produzione di fascia alta; mentre i motori a induzione enfatizzano la stabilità, l’affidabilità e il rapporto costo-efficacia, diventando la “pietra angolare dell’energia” nella produzione industriale e nelle applicazioni civili. Questo articolo analizza in modo esaustivo le differenze e le relazioni tra i due tipi di motori da diversi punti di vista, quali la composizione strutturale, il principio di funzionamento, le caratteristiche principali, gli scenari applicativi e i criteri di selezione, fornendo un riferimento per la scelta nelle applicazioni pratiche.
1. Posizionamento centrale e classificazione Panoramica dei motori
Un motore è un dispositivo elettromagnetico che converte l’energia elettrica in energia meccanica in base alla legge dell’induzione elettromagnetica. In base alla sua applicazione, può essere suddiviso in motori di potenza e motori di controllo. I motori a induzione appartengono alla categoria dei motori di potenza e la loro funzione principale è la conversione dell’energia elettrica in energia meccanica per fornire alimentazione continua e stabile a diverse apparecchiature. I motori a induzione sono oggi ampiamente utilizzati in macchinari generici, elettrodomestici e sistemi di alimentazione. I servomotori, d’altra parte, appartengono alla categoria dei motori di controllo. La loro funzione principale è quella di realizzare un controllo a circuito chiuso preciso di posizione, velocità e coppia sotto l’azione di segnali di controllo. Sono apparecchiature di automazione di fascia alta e attuatori fondamentali in apparecchiature di produzione di precisione.
Dal punto di vista delle applicazioni di mercato, i motori a induzione, grazie alla loro struttura semplice e all’elevata affidabilità, hanno gradualmente conquistato oltre il 70% della quota di mercato globale dei motori industriali, diventando la fonte di energia fondamentale nella produzione industriale. I servomotori stanno ora assistendo a un aumento delle applicazioni, in linea con la crescente domanda di aggiornamenti dell’automazione industriale, e il loro impiego in macchine utensili di fascia alta e robot industriali si sta diffondendo sempre di più, diventando un importante indicatore di eccellenza produttiva. Le due tipologie di motori hanno ambiti applicativi differenti, ma si completano a vicenda, supportando congiuntamente le diverse esigenze della produzione industriale.
2. Differenze strutturali tra servomotori e motori a induzione
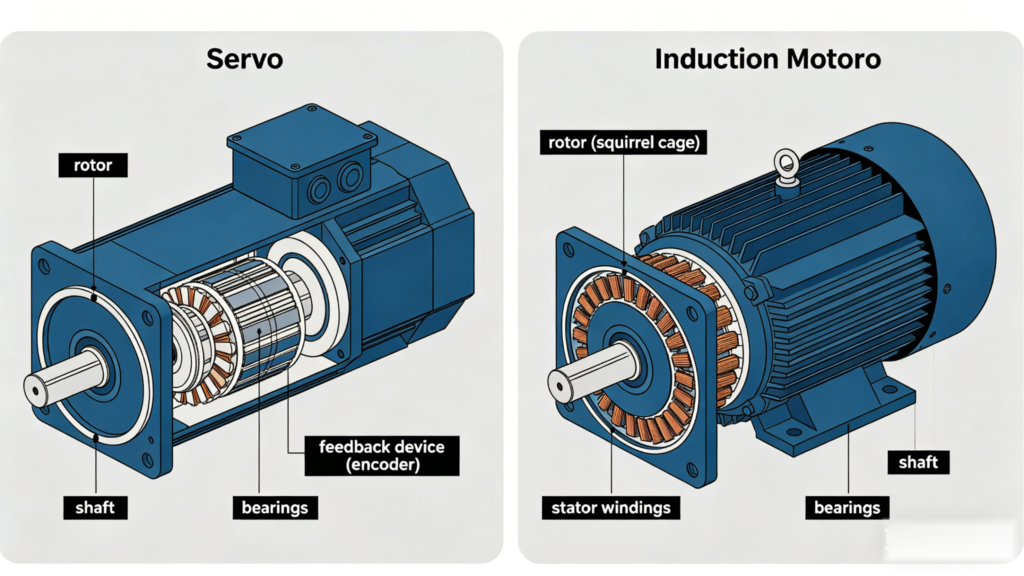
Come è noto, diverse strutture dei motori portano a prestazioni diverse. Sebbene entrambi i tipi di motori siano costituiti da componenti di base come statori, rotori, carter e cuscinetti, il design, i materiali e le funzioni dei loro componenti principali differiscono in modo significativo, e questa è la ragione fondamentale delle loro differenze di prestazioni.
2.1 Composizione strutturale dei servomotori
Un servomotore è un sistema completo di controllo ed esecuzione. Oltre al corpo motore, può integrare elementi di feedback ad alta precisione e richiede un servoazionamento dedicato per ottenere un controllo preciso di tutte e tre le componenti.
Il primo componente è il corpo del motore. Lo statore è costituito da più strati di lamierini di acciaio al silicio isolati, con avvolgimenti trifase incorporati. L’applicazione di corrente alternata genera un campo magnetico rotante. Il rotore utilizza tipicamente magneti permanenti al neodimio-ferro-boro disposti in un numero specifico di coppie di poli per migliorare l’efficienza e la velocità di risposta. L’involucro è sigillato, bilanciando dissipazione del calore, resistenza alle vibrazioni e tenuta stagna, rendendolo adatto ad ambienti industriali complessi.
Il secondo componente è l’elemento di feedback, che rappresenta l'”occhio” del motore. Esso raccoglie in tempo reale le informazioni sulla posizione e sulla velocità del rotore e le trasmette al driver. Gli encoder incrementali determinano la posizione tramite il conteggio degli impulsi, ma richiedono un punto di riferimento; gli encoder assoluti emettono direttamente un codice di posizione univoco, che viene conservato anche in caso di interruzione di corrente. I sistemi ad alta precisione utilizzano per lo più modelli a 17 bit o superiori, raggiungendo un posizionamento a livello nanometrico.
Il terzo componente è il servoazionamento, che funge da cervello ed è composto da un’unità di controllo principale DSP e da un modulo di conversione di potenza. Riceve principalmente istruzioni dal computer host e fornisce feedback dall’encoder, utilizzando un algoritmo di controllo a triplo anello chiuso per regolare la tensione e la corrente di uscita, garantendo un funzionamento preciso del motore. Integra inoltre funzioni di protezione da sovratensione e sovracorrente.
2.2 Composizione strutturale dei motori a induzione
I motori a induzione hanno una struttura relativamente semplice. Non richiedono elementi di retroazione o driver dedicati; i componenti principali sono solo lo statore, il rotore e l’involucro. La progettazione privilegia la semplicità e la robustezza.
Innanzitutto, lo statore. La sua struttura è simile a quella dello statore di un servomotore, ma la progettazione dell’avvolgimento è maggiormente focalizzata sull’efficienza di erogazione della potenza. Il diametro del filo e il numero di spire sono progettati in base alla potenza nominale per garantire la stabilità operativa a lungo termine.
In secondo luogo, c’è il rotore, che può essere suddiviso in rotore a gabbia di scoiattolo e rotore avvolto. Il tipo a gabbia di scoiattolo è il più diffuso; è costituito da barre guida e anelli terminali anulari, realizzati mediante un processo di fusione dell’alluminio, che si traduce in una struttura semplice e un tasso di guasto relativamente basso. Gli avvolgimenti del rotore del tipo a gabbia di scoiattolo possono essere condotti attraverso anelli collettori e spazzole, e si possono collegare resistori per migliorare le prestazioni di avviamento e regolazione della velocità. È adatto per scenari ad alta potenza e avviamenti frequenti.
Infine, ci sono i componenti ausiliari. L’involucro è realizzato principalmente in ghisa, che offre un’eccellente dissipazione del calore. Vengono utilizzati cuscinetti a sfere a gola profonda resistenti all’usura, che facilitano la manutenzione. I modelli ad alta potenza possono essere dotati di ventole di raffreddamento per garantire la dissipazione del calore sotto carichi elevati. La sua struttura semplice offre vantaggi in termini di costi e affidabilità.
2.3 Sintesi delle principali differenze strutturali
I servomotori utilizzano un controllo ad anello chiuso come principio fondamentale, il che si traduce in una struttura complessa e costosa. I motori a induzione, invece, privilegiano la semplicità e l’affidabilità, non richiedendo elementi di feedback o driver dedicati, con conseguente struttura più semplice e costi inferiori. Questa differenza determina direttamente le differenze in termini di precisione di controllo e velocità di risposta tra i due tipi di motore.
3. Differenze nei principi di funzionamento tra servomotori e motori a induzione
Entrambi i tipi di motori funzionano secondo la legge dell’induzione elettromagnetica, ma le loro diverse strutture comportano differenze fondamentali nei metodi di conversione dell’energia e nella logica di controllo: i motori a induzione realizzano una semplice conversione dell’energia elettrica in energia meccanica, senza richiedere un controllo preciso; i servomotori, invece, ottengono un controllo preciso del movimento tramite un sistema di retroazione a circuito chiuso.
3.1 Principio di funzionamento dei servomotori
I servomotori sono essenzialmente azionati per induzione elettromagnetica con controllo ad anello chiuso. Il meccanismo centrale elimina gli errori attraverso un triplo controllo ad anello chiuso, articolato in quattro fasi: in primo luogo, il driver riceve ed elabora i comandi di controllo dal computer host; in secondo luogo, viene applicata una specifica corrente alternata agli avvolgimenti dello statore, generando un campo magnetico rotante che fa ruotare il magnete permanente del rotore; in terzo luogo, l’encoder raccoglie e trasmette i parametri operativi effettivi; in quarto luogo, il driver regola l’uscita in base all’errore, correggendo lo stato operativo del rotore. La sua risposta di avvio/arresto è dell’ordine dei millisecondi e la sua capacità di sovraccarico può raggiungere tre volte la coppia nominale, soddisfacendo i requisiti di controllo ad alta velocità e alta precisione.
3.2 Principio di funzionamento dei motori a induzione
I motori a induzione realizzano un azionamento ad anello aperto basato sull’induzione elettromagnetica: una corrente alternata viene applicata agli avvolgimenti trifase dello statore per generare un campo magnetico rotante sincrono. I conduttori del rotore, a causa del movimento relativo con il campo magnetico, generano una corrente indotta, che viene poi azionata per ruotare dalla forza elettromagnetica. La sua caratteristica principale è lo slittamento. Durante il normale funzionamento, lo slittamento varia da 0,01 a 0,05, causando fluttuazioni della velocità in funzione del carico. Di conseguenza, le sue prestazioni di regolazione della velocità sono scarse. Se abbinato a un convertitore di frequenza, è possibile ottenere una regolazione continua della velocità, ma la sua precisione è di gran lunga inferiore a quella di un servomotore e la sua efficienza e il suo fattore di potenza sono bassi a bassi carichi.
3.3 Sintesi delle principali differenze nei principi di funzionamento
I servomotori sono azionamenti a circuito chiuso, capaci di correzione degli errori in tempo reale; i motori a induzione sono azionamenti di potenza a circuito aperto, che forniscono solo potenza in uscita. Queste differenze nei loro principi di funzionamento determinano i loro diversi scenari di applicazione.
4. Confronto delle caratteristiche principali dei servomotori e dei motori a induzione
A causa delle differenze di struttura e principio di funzionamento, i servomotori e i motori a induzione presentano differenze significative nelle loro caratteristiche principali, che ne determinano direttamente gli scenari di applicazione. Un confronto specifico è il seguente:
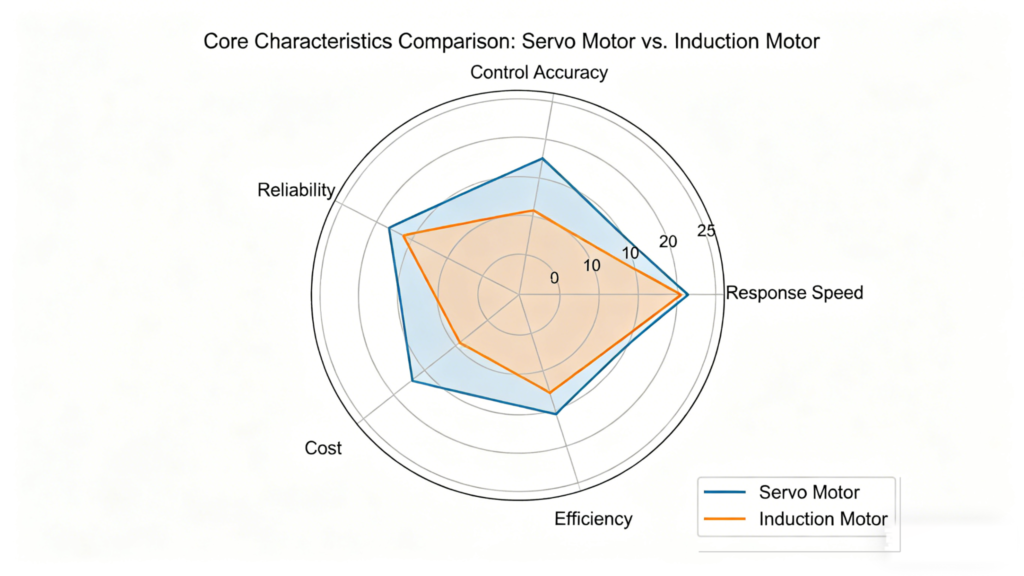
4.1 Precisione del controllo
I servomotori offrono un’accuratezza molto elevata, determinata dalla risoluzione dell’encoder. Possono raggiungere un posizionamento a livello nanometrico e un controllo preciso della velocità inferiore a 0,1 giri/min, grazie a un triplo controllo a circuito chiuso che elimina gli errori, risultando adatti a diversi scenari, come ad esempio l’assemblaggio di precisione. I motori a induzione utilizzano un controllo a circuito aperto, con un’accuratezza di velocità di solo ±1% a ±5%, e anche con un convertitore di frequenza raggiunge al massimo ±0,5%, un valore insufficiente per soddisfare i requisiti di alta precisione.
4.2 Velocità di risposta
I servomotori hanno un tempo di risposta all’avvio e all’arresto di 10-50 millisecondi, eccellenti prestazioni di accelerazione e sono adatti a scenari ad alta velocità e con frequenti avviamenti e arresti. I motori a induzione, invece, devono superare una notevole inerzia per avviarsi, con un tempo di risposta che va da diversi secondi a decine di secondi, il che li rende adatti a scenari di funzionamento continuo a lungo termine che non richiedono frequenti avviamenti e arresti.
4.3 Efficienza e consumo energetico
I servomotori hanno un’efficienza compresa tra il 90% e il 98%, mantenendo un’elevata efficienza anche con carichi leggeri. Il loro fattore di potenza è prossimo a 1, con conseguente basso consumo energetico. I motori a induzione hanno un’efficienza compresa tra il 75% e il 90%, ma questa diminuisce significativamente con carichi leggeri. Il loro fattore di potenza è compreso tra 0,7 e 0,9. A pieno carico, la differenza di consumo energetico tra servomotori e motori a induzione non è significativa.
4.4 Costi e manutenzione
I servomotori costano da 3 a 5 volte di più rispetto ai motori a induzione di pari potenza. L’encoder e il driver rappresentano una quota maggiore del costo, rendendo la manutenzione più complessa e richiedendo calibrazioni periodiche da parte di tecnici specializzati. I motori a induzione costano solo da 1/3 a 1/5 del prezzo, hanno una struttura semplice, un basso tasso di guasti e richiedono solo controlli periodici di lubrificazione e dissipazione del calore, con conseguenti costi di manutenzione estremamente bassi.
4.5 Affidabilità e adattabilità ambientale
I servomotori hanno una struttura più complessa e i loro componenti di precisione devono soddisfare elevati requisiti ambientali, essendo sensibili alle alte temperature, alla polvere e alle vibrazioni. I motori a induzione hanno una struttura più robusta, non presentano componenti di precisione e possono adattarsi ad ambienti industriali difficili, con conseguente minore tasso di guasti nel lungo periodo.
4.6 Caratteristiche di carico
I servomotori hanno un’elevata capacità di sovraccarico, il che li rende adatti a scenari con ampie fluttuazioni di carico e frequenti accelerazioni/decelerazioni. I motori a induzione hanno una capacità di sovraccarico inferiore, il che li rende adatti a scenari di carico costante senza forti impatti.
5. Scenari applicativi dei servomotori e dei motori a induzione
5.1 Scenari applicativi tipici dei servomotori
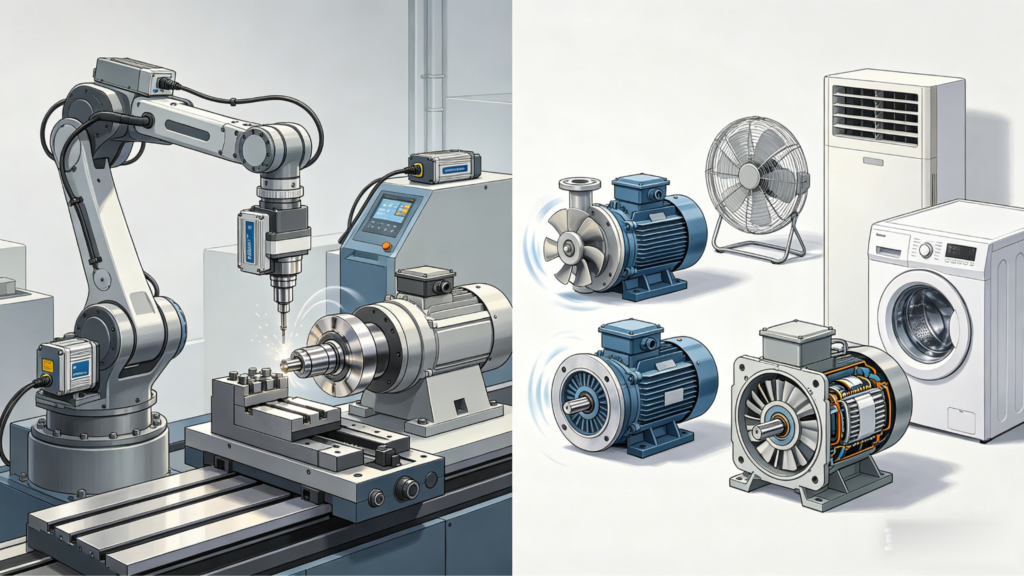
I servomotori si distinguono per l’elevata precisione, la rapida risposta e l’elevata capacità di sovraccarico, e sono utilizzati principalmente in scenari di produzione e automazione di fascia alta: robot industriali, macchine utensili a controllo numerico (CNC), apparecchiature per semiconduttori, apparecchiature per la produzione di componenti elettronici e apparecchiature per le energie rinnovabili. Trovano impiego anche in strumenti di precisione e apparecchiature medicali.
5.2 Scenari applicativi tipici dei motori a induzione
I motori a induzione, grazie alla loro semplicità, affidabilità ed elevata economicità, trovano impiego in svariati scenari di azionamento: apparecchiature industriali generiche (pompe, ventilatori, nastri trasportatori, ecc., fonti di energia di base), elettrodomestici (lavatrici, condizionatori d’aria, ecc., per soddisfare il fabbisogno energetico quotidiano), sistemi di alimentazione e trasporto ferroviario (ventilatori di raffreddamento, ecc., adattabili a elevati requisiti di potenza), macchine agricole (trattori, pompe idrauliche, ecc., resistenti ad ambienti difficili). Inoltre, anche il sistema di propulsione dei modelli Tesla Model S/X utilizza motori a induzione, ampliando così le sue applicazioni di fascia alta.
6. Principi e considerazioni per la selezione di servomotori e motori a induzione
6.1 Principi di selezione principali
- Per un controllo preciso: scegli un servomotore per un controllo preciso e un motore a induzione per la sola azionamento di potenza.
- In base alle caratteristiche di carico: scegliere un servomotore per ampie fluttuazioni di carico e frequenti operazioni di avvio e arresto, e un motore a induzione per carichi costanti e funzionamento a lungo termine.
- In base al budget: scegli un servomotore se hai un budget sufficiente e cerchi un’elevata precisione, oppure un motore a induzione se hai un budget limitato e cerchi un’elevata affidabilità, tenendo conto anche del consumo energetico a lungo termine.
- In base al budget: scegli un servomotore se hai un budget sufficiente e cerchi un’elevata precisione, oppure un motore a induzione se hai un budget limitato e cerchi un’elevata affidabilità, tenendo conto anche del consumo energetico a lungo termine.
6.2 Considerazioni sulla selezione
La scelta di un servomotore deve definire chiaramente i requisiti di controllo, la precisione dell’encoder e del driver deve essere compatibile, e occorre considerare anche il rapporto di inerzia del carico. La scelta di un motore a induzione richiede la determinazione della potenza e del numero di poli, l’abbinamento dell’inverter alle esigenze specifiche, la priorità data alle classi di efficienza più elevate come IE3/IE4 e l’installazione adeguata per soddisfare le esigenze del cliente.
7. Tendenze di sviluppo del settore e prospettive future
Con la promozione dell’automazione industriale e delle politiche di risparmio energetico e tutela ambientale, entrambe le tipologie di motori si stanno evolvendo verso una maggiore precisione, efficienza e intelligenza. I servomotori si concentrano su alta precisione, elevata reattività, miniaturizzazione, leggerezza e risparmio energetico intelligente. La loro diffusione in applicazioni di fascia alta si basa sulla combinazione di intelligenza artificiale e tecnologia di sincronizzazione multiasse. I motori a induzione, d’altro canto, puntano su una maggiore efficienza energetica, aggiornamenti più intelligenti e uno sviluppo specializzato, che consente loro di adattarsi agevolmente alle esigenze di diversi settori. Nel frattempo, l’emergere di prodotti integrati, come i servomotori e i motori a induzione, combina i vantaggi di entrambi, espandendosi anche in scenari di controllo di fascia media.
8. Conclusion
Sia i servomotori che i motori a induzione presentano vantaggi specifici. I servomotori offrono un controllo preciso, ideale per la produzione di fascia alta, mentre i motori a induzione garantiscono un’alimentazione stabile ed economica per applicazioni generiche. Nelle applicazioni pratiche, è fondamentale scegliere la soluzione più adatta in base alla precisione di controllo, alle caratteristiche di carico, al budget disponibile e alle condizioni ambientali. In futuro, sia i servomotori che i motori a induzione continueranno a essere ottimizzati e migliorati, fornendo un supporto energetico sempre più performante per l’automazione industriale e la produzione intelligente, e contribuendo a migliorare l’efficienza, la precisione e l’affidabilità delle apparecchiature.