















Motoren sind unverzichtbare Kernkomponenten in der modernen Industrieproduktion und im Alltag. Von kleinen Haushaltsgeräten wie Ventilatoren und Waschmaschinen bis hin zu großen Werkzeugmaschinen, Grubenlüftern und sogar den Antriebssystemen von Elektrofahrzeugen – sie sind allgegenwärtig. Unter den vielen Motortypen sind Wechselstrom- und Gleichstrommotoren die beiden grundlegendsten und am weitesten verbreiteten Kategorien. Obwohl beide elektrische Energie in mechanische Energie umwandeln können, unterscheiden sie sich deutlich in ihren Funktionsprinzipien, ihrem Aufbau, ihren Leistungseigenschaften und ihren Anwendungsbereichen. Oft werden ihre Einsatzgebiete verwechselt. Heute werden wir ihre Unterschiede und Anwendungsbereiche einfach und verständlich erläutern.
Zunächst müssen wir ein grundlegendes Konzept klären. Ob Wechselstrom- oder Gleichstrommotor – ihre Kernfunktion ist die Energieumwandlung. Der eine wandelt elektrische Energie in mechanische Energie um, um Geräte anzutreiben, der andere wandelt mechanische Energie in elektrische Energie zur Speicherung oder Übertragung um. Im Alltag begegnen uns am häufigsten Elektromotoren; beispielsweise verwenden Klimaanlagenkompressoren Wechselstrommotoren, während die meisten kleinen Motoren in elektrischem Spielzeug Gleichstrommotoren nutzen. Der Hauptunterschied liegt bereits in ihren Namen. Doch die unterschiedlichen Energiequellen sind nur die Oberfläche; die wahren Faktoren für ihre Leistung und Anwendung liegen in ihren internen Funktionsprinzipien und ihrer Konstruktion.
I. Kerndefinitionen und Klassifizierungen von Wechsel- und Gleichstrommotoren
Ein Wechselstrommotor, auch Wechselstrom-Elektromotor genannt, nutzt Wechselstrom (AC) zum Antrieb. Seine Hauptfunktion besteht darin, Wechselstrom in mechanische Energie umzuwandeln. Wechselstrommotoren sind im Alltag allgegenwärtig und in vielen verschiedenen Ausführungen erhältlich. Die gängigste Klassifizierung basiert auf der Rotordrehzahl und unterscheidet zwischen Synchronmotoren und Induktionsmotoren. Induktionsmotoren sind am weitesten verbreitet und decken den Großteil der Anwendungen von Wechselstrommotoren ab. Sie werden häufig in Wasserpumpen und Ventilatoren in Fabriken sowie in Haushaltsgeräten wie Waschmaschinen und Klimaanlagen eingesetzt. Synchronmotoren hingegen kommen in Anwendungen zum Einsatz, die eine hohe Drehzahlgenauigkeit erfordern, beispielsweise in großen Generatoren und Präzisionswerkzeugmaschinen.
Wechselstrommotoren lassen sich anhand der Anzahl ihrer Leistungsphasen in Einphasen- und Dreiphasenmotoren unterteilen. Einphasen-Wechselstrommotoren haben eine geringere Leistung und werden hauptsächlich in Haushaltsgeräten wie Ventilatoren und Kühlschränken eingesetzt, da sie an die einphasige Wechselstromversorgung in Haushalten angepasst sind. Dreiphasen-Wechselstrommotoren hingegen bieten eine höhere Leistung und einen höheren Wirkungsgrad und werden vorwiegend in der industriellen Produktion verwendet. Werkzeugmaschinen in Fabriken und Förderbänder in Bergwerken sind für ihre Stromversorgung auf dreiphasige Wechselstromleitungen in Industrieanlagen angewiesen.
Ein Gleichstrommotor, auch Gleichstrom-Elektromotor genannt, wird mit Gleichstrom (DC) betrieben. Er findet vor allem Anwendung in Bereichen, die eine präzise Drehzahlregelung und ein schnelles Ansprechverhalten erfordern. Je nach Erregungsart lassen sich vier Typen unterscheiden: fremderregte, Nebenschluss-, Reihenschluss- und Verbundmotoren. Fremderregte Gleichstrommotoren verfügen über separate Stromversorgungen für Feld- und Ankerwicklung, bieten eine optimale Drehzahlregelung und werden in Präzisionswerkzeugmaschinen und Walzwerken eingesetzt. Reihenschlussmotoren haben beide Wicklungen in Reihe geschaltet, was ein hohes Anlaufdrehmoment ermöglicht und sie für Kräne und Elektrozüge geeignet macht. Nebenschlussmotoren haben beide Wicklungen parallel geschaltet, was eine stabile Drehzahl gewährleistet und sie in Wasserpumpen und Gebläsen verwendet.
Es ist wichtig zu verstehen, dass bürstenlose Gleichstrommotoren nicht einfach eine Weiterentwicklung herkömmlicher Gleichstrommotoren darstellen. Ihr Funktionsprinzip ähnelt eher dem von Wechselstrommotoren. Sie können mit einem Wechselrichter betrieben werden, der Gleichstrom in Wechselstrom umwandelt und so die präzise Drehzahlregelung von Gleichstrommotoren mit den Vorteilen von Wechselstrommotoren kombiniert. Aktuell finden sie breite Anwendung in Elektrofahrzeugen, Drohnen und anderen Bereichen und stellen somit eine Verschmelzung beider Technologien dar.
2. Strukturelle Unterschiede zwischen Wechselstrom- und Gleichstrommotoren
Obwohl sowohl Wechselstrom- als auch Gleichstrommotoren einen Stator und einen Rotor in ihrer Grundstruktur besitzen, unterscheiden sich ihre spezifischen Komponenten und Funktionen deutlich, was sich direkt auf ihre Funktionsweise und Leistung auswirkt. Wir erklären es Ihnen verständlich und verzichten dabei auf Fachjargon.
(1) Aufbau eines Wechselstrommotors
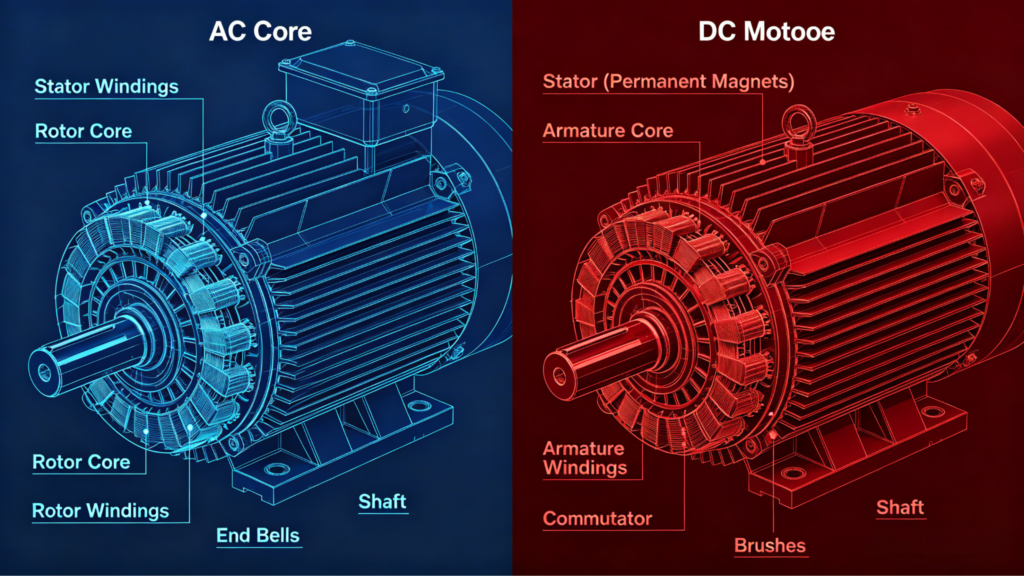
Der Aufbau eines Wechselstrommotors ist relativ einfach und besteht im Wesentlichen aus Stator, Rotor, Lagern und Enddeckeln. Er besitzt keinen komplexen Kommutierungsmechanismus, was ein wesentlicher Grund für seine Wartungsfreundlichkeit und die geringen Kosten ist.
Der Stator ist der stationäre Teil des Motors und erzeugt ein rotierendes Magnetfeld. Er besteht aus dem Statorkern und den Statorwicklungen. Der Statorkern ist aus 0,35–0,5 mm dickem Siliziumstahlblech gefertigt, wodurch Wirbelstromverluste effektiv reduziert und somit der Wirkungsgrad verbessert werden. Die Statorwicklungen bestehen aus Kupferdrahtspulen, die in die Nuten des Kerns gewickelt sind. Bei einem Drehstrommotor bestehen die Wicklungen aus drei Spulen, die in Dreieck- oder Sternschaltung angeordnet sind und einen Winkel von 120 Grad zueinander aufweisen. Beim Anlegen von Drehstrom erzeugen sie gemeinsam ein rotierendes Magnetfeld, das die treibende Kraft für die Rotation des Rotors darstellt.
Der Rotor ist das rotierende Bauteil, dessen Hauptfunktion darin besteht, unter dem Einfluss des rotierenden Magnetfelds ein Drehmoment zu erzeugen. Der Rotor eines Induktionsmotors ist käfigförmig und besteht aus Kupfer- oder Aluminiumstäben im Rotorkern. Seine beiden Enden sind durch Endringe kurzgeschlossen. Zu seinen Eigenschaften zählen seine robuste Bauweise und seine Widerstandsfähigkeit gegen Beschädigungen, was ein Hauptgrund für seine weite Verbreitung ist. Der Rotor eines Synchronmotors besteht aus hervorstehenden Magnetpolen, die mit Spulen umwickelt sind. Er benötigt einen vom Erreger gelieferten Gleichstrom, um sich synchron mit dem rotierenden Magnetfeld des Stators zu drehen.
Lager stützen die Rotorwelle und reduzieren die Reibung. Endkappen fixieren den Stator und dichten das Motorinnere ab. Insgesamt zeichnen sich Wechselstrommotoren durch einen einfachen Aufbau, wenige leicht zerbrechliche Teile, eine lange Lebensdauer und einfache Wartung aus.
(2) Aufbau von Gleichstrommotoren
Gleichstrommotoren weisen einen komplexeren Aufbau auf. Neben Stator und Rotor gehören Kommutator und Bürsten zu den Kernkomponenten. Dies ist entscheidend für die präzise Drehzahlregelung und zugleich der Hauptgrund für die hohen Wartungskosten.
Der Stator eines Gleichstrommotors erzeugt ein konstantes Hauptmagnetfeld und besteht aus den Hauptmagnetpolen, den Erregerwicklungen und dem Gehäuse. Die Hauptmagnetpole, bestehend aus dem Eisenkern und den Erregerwicklungen, erzeugen bei Anlegen von Gleichstrom ein konstantes Magnetfeld. Das Gehäuse ist Teil des Hauptmagnetkreises und dient gleichzeitig der mechanischen Stabilität. Im Gegensatz zu Wechselstrommotoren besitzen Gleichstrommotoren ein konstantes, nicht rotierendes Statormagnetfeld; dies ist der grundlegendste strukturelle Unterschied zwischen den beiden Motortypen.
Der Rotor eines Gleichstrommotors, auch Anker genannt, besteht aus einem Ankerkern, Ankerwicklungen und einer Welle. Der Ankerkern ist ebenfalls aus laminierten Siliziumstahlblechen gefertigt, in deren Nuten Kupferdrähte zu den Ankerwicklungen gewickelt sind. Dreht sich der Anker in einem konstanten Magnetfeld, schneiden die Wicklungen die Magnetfeldlinien und erzeugen so eine induzierte elektromotorische Kraft und einen Strom. Dieser Strom erzeugt wiederum ein elektromagnetisches Drehmoment, das den Rotor antreibt.
Der Kommutator ist an der Rotorwelle befestigt und besteht aus voneinander isolierten Kommutatorsegmenten, die jeweils mit beiden Enden der Ankerwicklung verbunden sind. Die Bürsten sind am Stator befestigt und gleiten über den Kommutator. Sie sind für die Zufuhr und Abfuhr des Gleichstroms zuständig. Da die Richtung des Gleichstroms festgelegt ist, ändert sich mit der Drehung des Ankers die Richtung, in der die Wicklungen die Magnetfeldlinien schneiden, und damit auch die Richtung des induzierten Stroms. Durch das Zusammenwirken von Kommutator und Bürsten kann die Richtung des Ankerwicklungsstroms schnell geändert werden, wodurch eine kontinuierliche, gleichgerichtete Drehung des Rotors gewährleistet wird.
Kommutatoren und Bürsten stellen ebenfalls Schwachstellen von Gleichstrommotoren dar: Der Gleitkontakt zwischen Bürsten und Kommutator verursacht Verschleiß, der einen regelmäßigen Austausch erforderlich macht, und erzeugt zudem Funken und Geräusche, was die Lebensdauer beeinträchtigt und Störungen in der Umgebung verursacht. Bürstenlose Gleichstrommotoren lösen dieses Problem, da sie auf diese beiden Komponenten verzichten und daher immer häufiger eingesetzt werden.
3. Unterschiede in den Funktionsprinzipien von Wechselstrom- und Gleichstrommotoren
Die Struktur bestimmt das Prinzip, und das Prinzip bestimmt die Leistung. Beide basieren auf dem Gesetz der elektromagnetischen Induktion, doch aufgrund von Unterschieden in der Stromversorgung und der Struktur unterscheiden sich ihre Wirkungsprozesse grundlegend. Daher müssen wir uns nicht in komplexen Formeln verlieren; wir können sie direkt durch intuitive Methoden verstehen.
(1) Funktionsprinzip von Wechselstrommotoren
Das Grundprinzip von Wechselstrommotoren beruht darauf, dass ein rotierendes Magnetfeld den Rotor in Rotation versetzt. Ob Synchron- oder Induktionsmotoren – sie alle nutzen das vom Stator erzeugte rotierende Magnetfeld, um den Rotor anzutreiben. Wir betrachten den gebräuchlichsten Drehstrom-Induktionsmotor als Beispiel, da sein Funktionsprinzip am repräsentativsten ist.
Wird Drehstrom an die Statorwicklungen angelegt, erzeugt jede Spule aufgrund der Phasenverschiebung von 120 Grad zwischen den drei Phasen ein magnetisches Wechselfeld. Die Überlagerung dieser Wechselfelder ergibt ein Drehfeld. Die Drehzahl dieses Drehfelds wird als Synchrondrehzahl bezeichnet und berechnet sich nach der Formel n = 60f/p (wobei f die Netzfrequenz und p die Polpaarzahl ist). Beispielsweise hat ein Drehstrom-Induktionsmotor mit 50 Hz Netzfrequenz und 4 Polen eine Synchrondrehzahl von 1500 U/min.
Das rotierende Magnetfeld schneidet die Leiter der Rotorwicklung. Gemäß dem Gesetz der elektromagnetischen Induktion erzeugen die Leiter eine induzierte elektromotorische Kraft und einen Strom. Der stromdurchflossene Leiter erfährt im Magnetfeld eine elektromagnetische Kraft, die ein Drehmoment erzeugt und den Rotor in Rotation versetzt. Entscheidend ist, dass die Rotordrehzahl eines Induktionsmotors stets unterhalb der Synchrondrehzahl liegt; diese Differenz wird als Schlupf bezeichnet. Genau aufgrund des Schlupfs kann der Rotor die Magnetfeldlinien kontinuierlich schneiden; daher wird er auch als Asynchronmotor bezeichnet.
Das Funktionsprinzip eines Synchronmotors unterscheidet sich geringfügig. Seine Rotorwicklungen benötigen eine Gleichstromerregung, um ein konstantes Magnetfeld im Rotor zu erzeugen. Das rotierende Magnetfeld des Stators und das Magnetfeld des Rotors ziehen sich gegenseitig an und gewährleisten so die synchrone Rotation. Die Rotordrehzahl entspricht der Synchrondrehzahl, ohne Schlupf, was eine präzise Drehzahlregelung ermöglicht und ihn für Anwendungen wie große Generatoren und Präzisionswerkzeugmaschinen geeignet macht.
(2) Funktionsprinzip von Gleichstrommotoren
Das Grundprinzip eines Gleichstrommotors ist die Rotation eines stromdurchflossenen Leiters in einem konstanten Magnetfeld. Durch das Zusammenwirken von Kommutator und Bürsten wird die kontinuierliche, unidirektionale Rotation des Rotors gewährleistet. Am anschaulichsten lässt sich dieses Prinzip am Beispiel eines fremderregten Gleichstrommotors veranschaulichen, bei dem Feldwicklung und Ankerwicklung getrennt gespeist werden.
Zunächst wird Gleichstrom an die Feldwicklung des Rotors angelegt, wodurch ein konstantes Hauptmagnetfeld erzeugt wird. Anschließend wird Gleichstrom an die Ankerwicklung des Rotors angelegt. Der Ankerleiter befindet sich in einem konstanten Magnetfeld und erfährt gemäß der Linke-Hand-Regel eine elektromagnetische Kraft, die ein elektromagnetisches Drehmoment erzeugt, welches den Anker in Rotation versetzt.
Wenn sich der Anker um einen bestimmten Winkel dreht, rotiert der Leiter entgegen der Richtung des Magnetfelds, wodurch sich auch die Richtung der elektromagnetischen Kraft ändert. Ohne Kommutator würde der Rotor seine Drehrichtung umkehren. In diesem Fall dreht sich der Kommutator mit dem Rotor, während die Bürsten stillstehen. Durch die Kommutierung wird die Stromrichtung in der Ankerwicklung zeitgerecht geändert, sodass die Richtung der elektromagnetischen Kraft unverändert bleibt und der Rotor sich in eine Richtung weiterdreht.
Dieses Prinzip ermöglicht es Gleichstrommotoren, ihre Drehzahl präzise anzupassen. Durch einfaches Ändern der Ankerspannung oder des Ankerstroms lässt sich die Drehzahl flexibel regeln, was ein schnelles Ansprechverhalten und ein hohes Anlaufdrehmoment ermöglicht – dies sind die Kernvorteile. Bürstenlose Gleichstrommotoren vereinen die Vorteile beider Bauarten. Die Statorwicklungen werden mit Wechselstrom versorgt, der von einem Wechselrichter in ein rotierendes Magnetfeld umgewandelt wird. Der Rotor, ein Permanentmagnet, benötigt keine Energie, was zu keinem Verschleiß, keiner Funkenbildung und einer deutlich längeren Lebensdauer sowie einem geringeren Wartungsaufwand führt.
4. Vergleich der Leistungsmerkmale von Wechsel- und Gleichstrommotoren
Die Leistungsmerkmale beider Motoren ergänzen sich: Wechselstrommotoren zeichnen sich durch ihren einfachen Aufbau, die leichte Wartung und die geringen Kosten aus; Gleichstrommotoren hingegen durch präzise Drehzahlregelung, schnelles Ansprechverhalten und hohes Anlaufdrehmoment. Ein Vergleich der folgenden Aspekte verdeutlicht dies.
(1) Geschwindigkeitsregelung
Die präzise Drehzahlregelung ist der Hauptvorteil von Gleichstrommotoren. Herkömmliche Gleichstrommotoren ermöglichen eine weite und genaue Drehzahlregelung durch einfaches Ändern der Ankerspannung oder des Erregerstroms. Der Prozess verläuft gleichmäßig, die Reaktion ist schnell und die Drehzahlabweichung gering, wodurch sie sich ideal für Präzisionswerkzeugmaschinen, Roboter und andere Anlagen eignen.
Wechselstrommotoren weisen eine vergleichsweise geringe Drehzahlregelung auf. Die Drehzahl herkömmlicher Induktionsmotoren wird hauptsächlich durch die Netzfrequenz und die Polpaarzahl bestimmt, was komplexe Regelungseinrichtungen erfordert. Obwohl neuere Technologien wie die Vektorregelung die Genauigkeit der Drehzahlregelung verbessert haben, sind ihre Flexibilität und Reaktionsgeschwindigkeit immer noch geringer als die von Gleichstrommotoren. Für Anwendungen wie Ventilatoren und elektrische Lüfter, bei denen keine präzise Drehzahlregelung erforderlich ist, sind sie jedoch vollkommen ausreichend.
(2) Startleistung
Gleichstrommotoren zeichnen sich durch ein hohes Anlaufdrehmoment, einen niedrigen Anlaufstrom und einen sanften Anlaufvorgang aus und eignen sich daher für Geräte mit hohem Anlaufleistungsbedarf, wie beispielsweise Kräne und Aufzüge. Sie überwinden Lastwiderstände problemlos und schützen so die Geräte.
Wechselstrommotoren haben ein geringes Anlaufdrehmoment und einen hohen Anlaufstrom, was das Stromnetz belasten und ihre Lebensdauer beeinträchtigen kann. Leistungsstarke Wechselstrommotoren benötigen einen Stern-Dreieck-Anlauf oder Sanftanlaufgeräte zur Stromreduzierung, während leistungsschwache Motoren direkt angelaufen werden können.
(3) Wartungskosten und Nutzungsdauer
Wechselstrommotoren besitzen weder Kommutatoren noch Bürsten. Ihr Aufbau ist einfach und enthält keine leicht zerbrechlichen Teile. Für einen normalen Betrieb genügt es, die Lager regelmäßig zu prüfen und Staub zu entfernen. Ihre Lebensdauer beträgt über 10 Jahre, und die Wartung ist auch für Laien problemlos möglich.
Herkömmliche Gleichstrommotoren besitzen Kommutatoren und Kohlebürsten. Der Bürstenverschleiß erfordert einen regelmäßigen Austausch, und der Kommutator neigt zu Funkenbildung und Verschleiß. Die Wartung erfordert Fachpersonal, was zu hohen Kosten und einer Lebensdauer von etwa 5–8 Jahren führt. Bürstenlose Gleichstrommotoren verzichten auf diese beiden Komponenten, wodurch ihre Wartungskosten und Lebensdauer mit denen von Wechselstrommotoren vergleichbar sind.
(4) Effizienz und Energieverbrauch
Wechselstrommotoren sind hocheffizient und energiesparend. Dreiphasen-Induktionsmotoren erreichen einen Wirkungsgrad von 85–95 % und weisen unter Nennlast einen stabilen Energieverbrauch auf. Dadurch eignen sie sich für Geräte wie Fabrikventilatoren und Förderbänder, die über längere Zeiträume kontinuierlich laufen und somit Energie sparen.
Herkömmliche Gleichstrommotoren erreichen einen Wirkungsgrad von 75–85 %, ihr Energieverbrauch steigt jedoch bereits bei geringer Last deutlich an, wodurch sie für den Dauerbetrieb ungeeignet sind. Bürstenlose Gleichstrommotoren hingegen weisen einen Wirkungsgrad auf, der dem von Wechselstrommotoren nahekommt, und ihr Energieverbrauch ist bei Drehzahlregelung sogar noch geringer. Daher finden sie breite Anwendung in energiesensiblen Bereichen wie Elektrofahrzeugen und Drohnen.
(5) Kosten
Wechselstrommotoren zeichnen sich durch einen einfachen Aufbau, wenige Bauteile und ausgereifte Fertigungsprozesse aus, was zu geringeren Herstellungs- und Betriebskosten führt. Insbesondere Drehstrommotoren sind kostengünstig und daher sowohl in der Industrie als auch im Alltag die bevorzugte Wahl.
Gleichstrommotoren sind teurer. Herkömmliche Gleichstrommotoren haben komplexe Strukturen, sind schwierig herzustellen und verursachen hohe Herstellungs- und Wartungskosten. Bürstenlose Gleichstrommotoren benötigen Wechselrichter, was sie noch teurer macht, doch ihre Kosten sinken mit dem technologischen Fortschritt stetig.
5. Vergleich der Anwendungsszenarien von Wechselstrommotoren und Gleichstrommotoren
Anhand der Leistungsmerkmale von Wechsel- und Gleichstrom lassen sich ihre Anwendungsbereiche klar unterscheiden: Für Anwendungen, die keine präzise Drehzahlregelung erfordern und bei denen niedrige Kosten und hohe Zuverlässigkeit im Vordergrund stehen, wählt man Wechselstrommotoren; für Anwendungen, die eine präzise Drehzahlregelung, ein schnelles Ansprechverhalten und ein hohes Anlaufdrehmoment erfordern, wählt man Gleichstrommotoren (oder bürstenlose Gleichstrommotoren), wie nachfolgend detailliert beschrieben.
(1) Anwendungsszenarien von Wechselstrommotoren
Wechselstrommotoren finden in vielen Bereichen Anwendung, darunter Industrie, Alltag, Transport und erneuerbare Energien. In der industriellen Produktion treiben Drehstrom-Induktionsmotoren Geräte wie Ventilatoren, Pumpen und Werkzeugmaschinen an, während Synchronmotoren in großen Generatoren und Präzisionswerkzeugmaschinen zum Einsatz kommen. Auch im Alltag werden sie verwendet, beispielsweise in Haushaltsgeräten wie Ventilatoren, Waschmaschinen und Klimaanlagen, die mit Einphasen-Wechselstrommotoren einen stabilen Betrieb gewährleisten. Im Transportwesen, etwa in Elektrofahrzeugen, Zügen und U-Bahnen, ermöglichen Synchronmotoren die Drehzahlregelung und reduzieren den Energieverbrauch. Schließlich werden sie auch im Bereich der erneuerbaren Energien, insbesondere in Wind- und Wasserkraftanlagen, zur Umwandlung elektrischer Energie eingesetzt.
(2) Anwendungsszenarien von Gleichstrommotoren
Gleichstrommotoren werden hauptsächlich in Bereichen eingesetzt, die eine präzise Drehzahlregelung und ein hohes Anlaufdrehmoment erfordern. Die Anwendungsszenarien für konventionelle und bürstenlose Motoren unterscheiden sich geringfügig, vor allem in folgenden Aspekten: Erstens, Präzisionsmaschinen: Konventionelle Gleichstrommotoren werden in Präzisionswerkzeugmaschinen und Robotern eingesetzt und erfüllen die Anforderungen an eine präzise Drehzahlregelung. Zweitens, Hebe- und Transportwesen: Konventionelle Gleichstrommotoren können in Kränen und Aufzügen verwendet werden und treiben Lasten mit ihrem hohen Anlaufdrehmoment an. Drittens, Kleingeräte: Konventionelle Gleichstrommotoren eignen sich für elektrisches Spielzeug und Elektrowerkzeuge und bieten geringe Größe und flexible Drehzahlregelung. Viertens, High-End-Anwendungen: Bürstenlose Gleichstrommotoren werden in Elektrofahrzeugen, Drohnen und Medizingeräten eingesetzt und bieten gleichzeitig hohe Effizienz, lange Lebensdauer und geringen Wartungsaufwand.
6. Entwicklungstrends von Wechsel- und Gleichstrommotoren
Mit der Entwicklung der Leistungselektronik, der Mikroelektronik und der digitalen Steuerungstechnik schreiten beide Technologien ständig voran, verwischen die Grenzen und zeigen einen Trend zur „integrierten Entwicklung“.
Die Entwicklung von Wechselstrommotoren zielt auf höhere Effizienz, intelligentere Systeme und Miniaturisierung ab. Je stärker hocheffiziente Motoren gefördert werden, desto geringer ist der Energieverbrauch – insbesondere in Kombination mit dem industriellen Internet der Dinge.