
- Inicio
- Producto
- Motor estándar GOST
- Motor estándar IEC
 Motor monofásico serie MC con arranque por condensador
Motor monofásico serie MC con arranque por condensador- Motor monofásico serie MY/MYT con condensador permanente
- Motor monofásico serie ML con doble condensador asíncrono
- Motor trifásico serie ME2 con carcasa de aluminio de alta eficiencia (IE2)
- Motor trifásico serie ME3 con carcasa de aluminio de alta eficiencia (IE3)
- Motor trifásico serie Y2 con carcasa de hierro fundido (IE1)
- Motor trifásico serie MS con carcasa de aluminio (IE1)
- Motor trifásico serie YE2 con carcasa de hierro fundido de alta eficiencia (IE2)
- Motor trifásico serie YE3 con carcasa de hierro fundido de alta eficiencia (IE3)
- Motor para aplicaciones especiales
- Motor para puerta enrollable
- Aplicación industrial
- Noticias
- Sobre nosotros
- Contáctanos














Motores de inducción y motores síncronos
Los motores son omnipresentes en nuestra vida cotidiana y en la producción industrial. Desde aires acondicionados y lavadoras en nuestros hogares hasta cintas transportadoras y máquinas herramienta en fábricas, y grupos electrógenos en centrales eléctricas, encontramos motores dondequiera que se necesite energía. Entre los muchos tipos de motores, los motores de inducción y los motores síncronos son los dos motores de corriente alterna más importantes y de uso más común. Aunque su función es similar, ya que ambos convierten la energía eléctrica en energía mecánica, poseen características y capacidades completamente diferentes, destacando cada uno en su respectivo campo. Hoy, adentrémonos en el mundo de estos dos tipos de motores, analizando sus diferencias, características y los secretos de sus aplicaciones que se esconden tras su uso diario.
La diferencia fundamental: velocidad del rotor frente al campo magnético giratorio del estator.
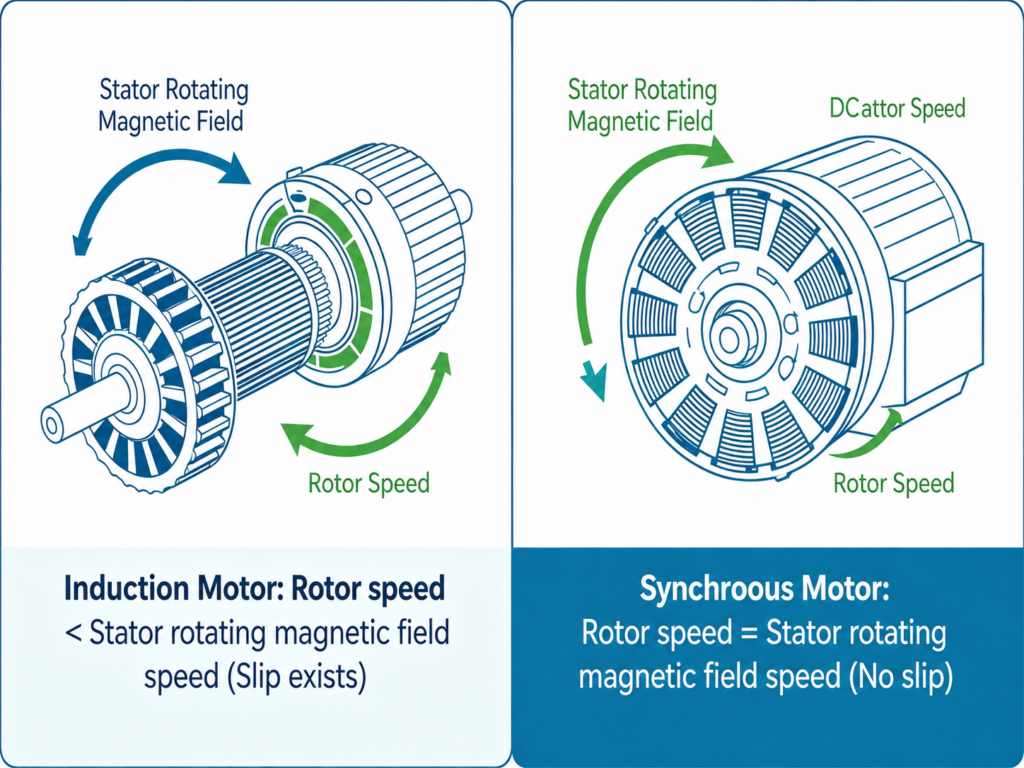
Para distinguir entre motores de inducción y motores síncronos, primero debemos comprender su diferencia más crucial: la relación entre la velocidad de rotación del rotor y la velocidad del campo magnético giratorio del estator. Solo con estos dos aspectos podemos denominarlos motores «síncronos» y «de inducción». En términos sencillos, la velocidad del rotor de un motor síncrono siempre está sincronizada con la velocidad de rotación del campo magnético giratorio del estator, como dos personas tomadas de la mano corriendo a un ritmo constante, con pasos perfectamente sincronizados y sin ninguna desviación. Por el contrario, la velocidad del rotor de un motor de inducción siempre es ligeramente inferior a la velocidad de rotación del campo magnético giratorio del estator, como alguien que persigue a un compañero, siempre un pequeño paso por detrás. Esta diferencia de velocidad se denomina «deslizamiento» y es la clave de la capacidad de un motor de inducción para generar potencia.
Motores de inducción: el todoterreno confiable
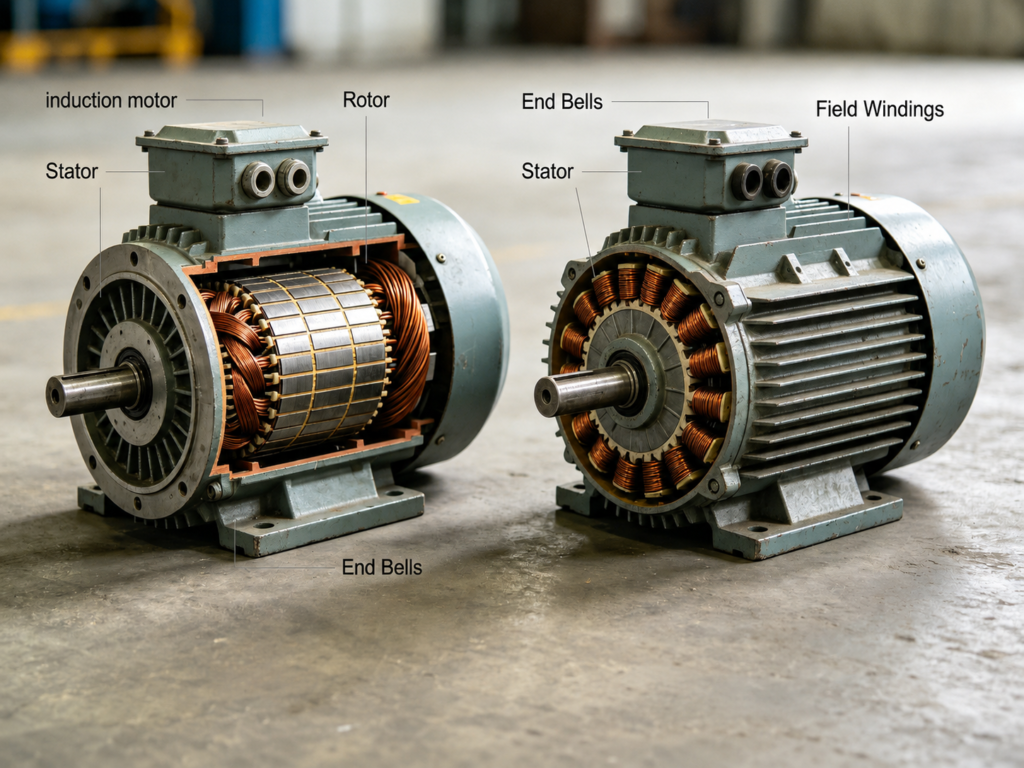
Estructura: Simple y robusto
La estructura de un motor de inducción es muy simple, compuesta principalmente por un estator y un rotor, sin dispositivos adicionales complejos. El estator es la parte fija del motor, construida con láminas de acero al silicio apiladas y bobinadas trifásicas enrolladas a su alrededor. Al aplicarle corriente alterna, el estator genera un campo magnético giratorio que, en esencia, impulsa al rotor. El rotor suele ser de tipo jaula de ardilla; como su nombre indica, tras retirar el núcleo de hierro, las barras conductoras y los anillos de cortocircuito en ambos extremos se conectan, dándole una forma de jaula. Generalmente está fabricado de aluminio o cobre fundido, y su estructura es robusta y resistente. También existe un tipo de rotor bobinado, con bobinadas trifásicas independientes, que puede conectarse a una resistencia externa mediante anillos colectores, pero actualmente se utiliza con poca frecuencia.
Principio de funcionamiento: Impulsado por inducción electromagnética
Su principio de funcionamiento se basa completamente en la ley fundamental de la inducción electromagnética, de ahí su nombre: motor de inducción. Al aplicar corriente alterna trifásica a los devanados del estator, se genera un campo magnético giratorio. Este campo magnético se propaga rápidamente sobre los conductores fijos del rotor. Según la ley de inducción electromagnética de Faraday, cuando un conductor se mueve en un campo magnético, se induce una fuerza electromotriz (FEM). Los conductores del rotor forman un circuito cerrado, y esta FEM genera una corriente inducida. Esta corriente inducida, en el campo magnético giratorio, está sometida a una fuerza electromagnética, generando así un par electromagnético que impulsa la rotación del rotor.
Un fenómeno clave: el «deslizamiento» que permite la generación de potencia.
He aquí un fenómeno interesante que quizás hayas notado: el rotor rara vez alcanza la velocidad del campo magnético giratorio del estator. Si la velocidad del rotor fuera exactamente igual a la del campo magnético, no habría movimiento relativo entre ellos. Los conductores del rotor no cortarían las líneas de fuerza magnéticas y, por lo tanto, no se generaría corriente inducida ni par electromagnético, lo que provocaría que el rotor perdiera potencia instantáneamente. Por consiguiente, la velocidad del rotor de un motor de inducción debe ser ligeramente inferior a la del campo magnético; su deslizamiento suele estar entre el 1 % y el 5 %. Es esta pequeña diferencia la que le permite generar potencia de forma continua. Por ejemplo, el ventilador eléctrico de nuestros hogares parece girar suavemente, pero en realidad el rotor está constantemente siguiendo el campo magnético; la diferencia de velocidad es tan pequeña que resulta imperceptible a simple vista.
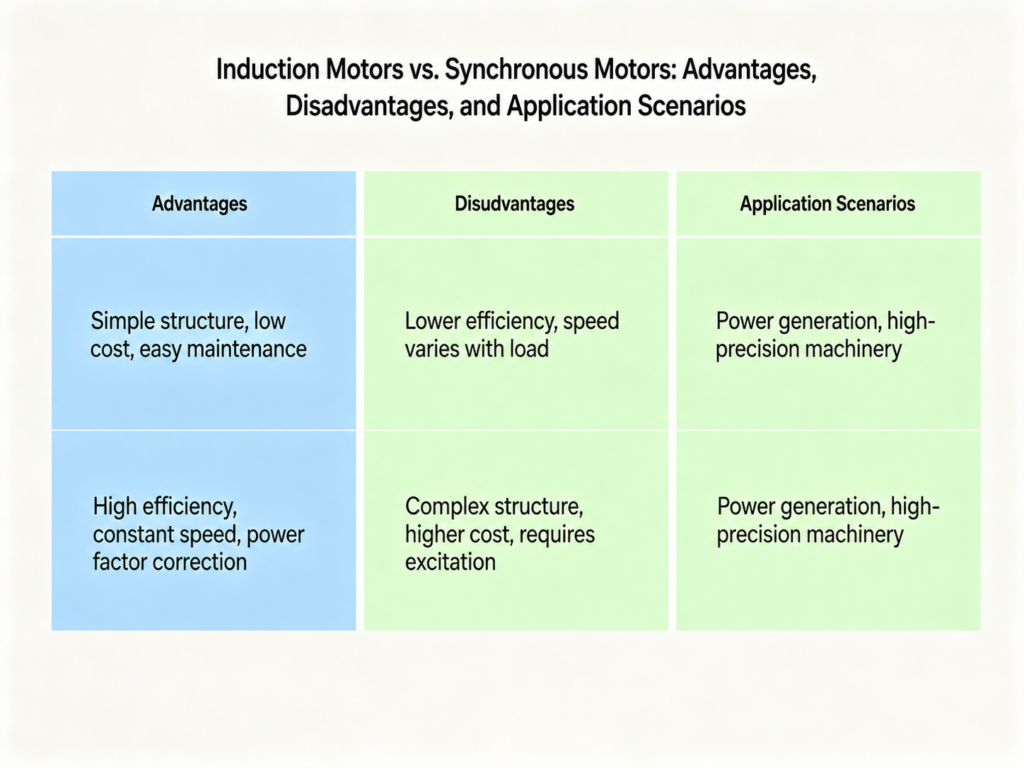
Ventajas y desventajas
Los motores de inducción ofrecen numerosas ventajas. Por ejemplo, son sencillos y duraderos, requieren un mantenimiento mínimo, tienen bajos costes de fabricación y pueden arrancar automáticamente sin necesidad de dispositivos auxiliares adicionales. En la práctica, basta con conectarlos a una fuente de alimentación para que comiencen a girar automáticamente, lo que explica su amplio uso en hogares y entornos industriales. Sin embargo, también presentan algunos inconvenientes. Siempre consumen potencia reactiva de la red para generar el campo magnético giratorio, lo que provoca un desfase del factor de potencia y requiere condensadores y otros equipos para su compensación. Además, con una frecuencia fija, la velocidad disminuye a medida que aumenta la carga, lo que imposibilita alcanzar una velocidad absolutamente constante. Asimismo, su regulación de velocidad no es tan precisa como la de los motores síncronos. Si bien la velocidad puede ajustarse mediante la conversión de frecuencia y el cambio de polos, no alcanza su máxima eficiencia en aplicaciones de alta precisión.
Aplicaciones: Presentes en todos los ámbitos de la vida cotidiana y la industria.
Desde el punto de vista de las aplicaciones, los motores de inducción son prácticamente omnipresentes. Se utilizan ampliamente en diversas aplicaciones, desde electrodomésticos como compresores de aire acondicionado, lavadoras y ventiladores eléctricos, hasta equipos industriales como ventiladores, bombas, cintas transportadoras y máquinas herramienta, así como diversos equipos mecánicos en minería y agricultura. Como un todoterreno, no es exigente con su entorno de trabajo ni requiere alta precisión. Solo necesita potencia para generar energía de forma silenciosa. Además, los motores de inducción pueden operar en tres estados: modo motor, modo generador y modo de frenado electromagnético, aunque la mayor parte del tiempo funcionan como motor.
Motores síncronos: El experto en precisión
Característica principal: Sincronización perfecta
Tras haber hablado de los motores de inducción, pasemos ahora al experto en precisión del mundo de la mecánica: el motor síncrono. Si los motores de inducción priorizan la practicidad y la durabilidad, los motores síncronos priorizan la precisión y la eficiencia. Son la base de los sistemas de potencia, especialmente insustituibles en la generación de energía a gran escala y en aplicaciones de accionamiento de alta precisión.
La característica principal de un motor síncrono es la sincronización completa entre la velocidad de su rotor y la velocidad del campo magnético rotacional del estator. Esto se refleja en la fórmula: n = ns = 60f/p, donde f es la frecuencia de la red eléctrica y p es el número de pares de polos. Siempre que la frecuencia de la red eléctrica sea fija, la velocidad del motor síncrono permanecerá constante e inalterada por la carga. Al igual que un soldado disciplinado que mantiene un ritmo constante independientemente de la dificultad de la tarea, esta característica lo distingue en situaciones que requieren velocidad constante y alta precisión.
Estructura: Más complejo, más variado.
En comparación con los motores de inducción, los motores síncronos tienen una estructura más compleja y una mayor variedad de tipos de rotor. Sus rotores requieren una fuente de campo magnético independiente y se dividen principalmente en tres tipos: de bobinado de excitación, de imán permanente y de reluctancia. El rotor de bobinado de excitación tiene bobinas, energizadas por corriente continua a través de anillos colectores y escobillas; esta es la forma más común en los grandes motores síncronos. El rotor de imán permanente está compuesto por imanes permanentes como el neodimio-hierro-boro; no requiere excitación de CC externa y tiene una estructura relativamente simple, ampliamente utilizada en equipos pequeños y medianos, como motores de tracción para vehículos eléctricos. El rotor de reluctancia consta de un núcleo de hierro con forma especial; no tiene bobinados ni imanes permanentes, genera par basado en el principio de mínima reluctancia magnética, y su control es relativamente más complejo.
Principio de funcionamiento: Atracción entre polos opuestos
El principio de funcionamiento de un motor síncrono se asemeja a la atracción entre polos opuestos. Al aplicar corriente alterna trifásica a los devanados del estator, se genera un campo magnético giratorio. El rotor genera un campo magnético constante mediante excitación o imanes permanentes. Cuando el número de pares de polos en el campo magnético del rotor es igual al número de pares de polos en el campo magnético del estator, el campo magnético giratorio del estator actúa como un imán, atrayendo el campo magnético del rotor y provocando su rotación síncrona. Sin embargo, existe un pequeño problema: los motores síncronos no pueden arrancar directamente, ya que la velocidad de rotación del campo magnético del estator es demasiado alta cuando el rotor está parado para alcanzar instantáneamente la velocidad síncrona. Por lo tanto, se requiere alimentación auxiliar para arrancar los devanados. Una vez que la velocidad se aproxima a la velocidad síncrona, se aplica excitación de CC para sincronizar el rotor; o bien, se puede utilizar un convertidor de frecuencia para aumentar gradualmente la frecuencia de la fuente de alimentación desde velocidad cero y lograr un arranque suave.
Ventajas y desventajas
Las ventajas de los motores síncronos compensan con precisión las deficiencias de los motores de inducción. Los motores síncronos de imanes permanentes (PMSM) ajustan automáticamente su factor de potencia. Al modificar la magnitud de la corriente de excitación del rotor, funcionan como compensadores inductivos, capacitivos o incluso síncronos, suministrando potencia reactiva a la red y mejorando su factor de potencia, fundamental para la estabilidad de los sistemas eléctricos. Con la misma potencia nominal, los PMSM ofrecen la máxima eficiencia, ya que el rotor no presenta pérdidas por efecto Joule, lo que se traduce en un menor consumo energético. Además, su velocidad constante y la alta precisión de su regulación satisfacen las exigencias de los accionamientos de alta precisión.
Sin embargo, los motores síncronos también presentan inconvenientes: mayores costos de fabricación, especialmente debido al elevado precio de los materiales de imanes permanentes; una estructura compleja que requiere un sistema de excitación y escobillas de anillo colector, lo que conlleva costos de mantenimiento relativamente altos, ya que las escobillas necesitan ser reemplazadas periódicamente; y la incapacidad de autoarranque, lo que requiere un dispositivo de arranque adicional. Estas características limitan su adopción generalizada en comparación con los motores de inducción, concentrando sus aplicaciones en escenarios que exigen alta precisión, eficiencia y velocidad constante.
Aplicaciones: Concentradas en sectores de alta gama.
La aplicación de los motores síncronos se concentra principalmente en sectores de alta tecnología. Las centrales térmicas, hidroeléctricas y nucleares utilizan casi exclusivamente generadores síncronos, que convierten la energía mecánica en energía eléctrica para proporcionar un suministro eléctrico estable a toda la red. Los equipos industriales de gran tamaño, como compresores de aire, ventiladores de gran tamaño y molinos de bolas, requieren un funcionamiento a velocidad constante y son sensibles al factor de potencia, por lo que suelen utilizar motores síncronos. En la fabricación de precisión, los husillos de las máquinas herramienta CNC, los equipos de alta velocidad y los sistemas de servoaccionamiento emplean mayoritariamente motores síncronos de imanes permanentes, aprovechando sus capacidades de control de velocidad de alta precisión para garantizar la exactitud del mecanizado. Además, los motores de tracción de los vehículos eléctricos están adoptando cada vez más motores síncronos de imanes permanentes, que equilibran la eficiencia y la potencia.
Motores de inducción frente a motores síncronos: no existe una superioridad absoluta, solo son opciones adecuadas.
A estas alturas, ya debería poder distinguir claramente entre motores de inducción y motores síncronos. En realidad, no existe una superioridad o inferioridad absoluta entre ellos; simplemente tienen sus fortalezas y funciones en diferentes campos, complementándose entre sí. En pocas palabras, los motores de inducción son como personas comunes, confiables y capaces: de estructura simple, bajo costo y duraderos, responsables de la mayoría de las necesidades energéticas diarias e industriales. Los motores síncronos son como profesionales meticulosos: altamente precisos, eficientes y capaces de ajustar el factor de potencia, abordando desafíos energéticos de alta gama y alta precisión. Podemos entender esto con una analogía simple. Si comparamos los motores con automóviles, los motores de inducción son como sedanes familiares: asequibles, duraderos y adecuados para las necesidades diarias de la mayoría de las personas. Los motores síncronos, por otro lado, son como autos deportivos de alta gama o vehículos especiales.
Vehículos: de alto rendimiento y gran precisión. Si bien son costosos y su mantenimiento es más complejo, pueden realizar tareas que los automóviles comunes no pueden.
Conclusión: Poder complementario para una vida mejor
En aplicaciones prácticas, la elección del motor depende principalmente de los requisitos específicos. En concreto, para electrodomésticos y maquinaria industrial general, donde la precisión de la velocidad no es crítica y los presupuestos son limitados, los motores de inducción son la mejor opción. Para la generación de energía a gran escala, el mecanizado de precisión y los equipos de alta gama que requieren velocidad constante, alta precisión, alta eficiencia o ajuste del factor de potencia, los motores síncronos son la mejor opción. Gracias a los avances tecnológicos, el rendimiento de ambos tipos de motores mejora constantemente. Por ejemplo, la eficiencia de los motores de inducción de alta eficiencia aumenta continuamente, mientras que el coste de los motores síncronos de imanes permanentes disminuye gradualmente. Sus aplicaciones se superponen y se expanden cada vez más, proporcionando conjuntamente un soporte energético más potente y eficiente para nuestra vida cotidiana y la producción industrial.
Desde la invención del motor de inducción por Tesla hasta el papel central del motor síncrono en el sistema eléctrico, el desarrollo de estos dos tipos de motores no solo ha sido testigo del progreso de la industria energética, sino que también ha transformado nuestras vidas. Aunque son meros objetos, encierran los principios físicos más ingeniosos; aparentemente ordinarios, sustentan el funcionamiento normal de la sociedad moderna. Ya sea el ventilador eléctrico que gira en tu casa o los grupos electrógenos que rugen en una central eléctrica, todos funcionan silenciosamente. Con este artículo, espero que todos hayan comprendido mejor las diferencias y características de los motores de inducción y los motores síncronos. Esto no solo nos ayudará a comprender mejor los principios de funcionamiento de los dispositivos que nos rodean, sino que también nos permitirá apreciar el encanto de la tecnología. Cada dispositivo, aparentemente simple, encierra en realidad la sabiduría y la exploración humanas.