
- Casa
- Prodotto
- Motore standard GOST
- Motore standard IEC
 Motore asincrono monofase serie MY/MYT con condensatore di marcia
Motore asincrono monofase serie MY/MYT con condensatore di marcia- Motore asincrono monofase serie ML con doppio condensatore
- Motore trifase ad alta efficienza serie ME2 con carcassa in alluminio
- Motore trifase ad alta efficienza serie ME3 con carcassa in alluminio
- Motore trifase ad alta efficienza serie YE2 con carcassa in ghisa (IE2)
- Motore trifase ad alta efficienza serie YE3 con carcassa in ghisa (IE3)
- Motore asincrono monofase serie MC con avviamento a condensatore
- Motore trifase serie MS con carcassa in alluminio (IE1)
- Motore trifase serie Y2 con carcassa in ghisa (IE1)
- Motore per applicazioni speciali
- Motore per porta avvolgibile
- Applicazione industriale
- Notizie
- Chi siamo
- Contattaci














Motori a induzione e motori sincroni
I motori sono onnipresenti nelle nostre vite e nella produzione industriale. Dai condizionatori d’aria e dalle lavatrici nelle nostre case ai nastri trasportatori e alle macchine utensili nelle fabbriche, fino ai gruppi elettrogeni nelle centrali elettriche, troviamo motori ovunque sia necessaria energia. Tra i molti tipi di motori, i motori a induzione e i motori sincroni sono i due motori a corrente alternata più importanti e comunemente utilizzati. Appaiono simili nella funzione, entrambi convertono l’energia elettrica in energia meccanica, ma possiedono “personalità” e “capacità” completamente diverse, ognuno eccellendo nel proprio campo. Oggi, addentriamoci nel mondo di questi due tipi di motori, analizzando le loro differenze, caratteristiche e i segreti delle loro applicazioni che si celano dietro l’uso quotidiano.
La differenza fondamentale: velocità del rotore rispetto al campo magnetico rotante dello statore.
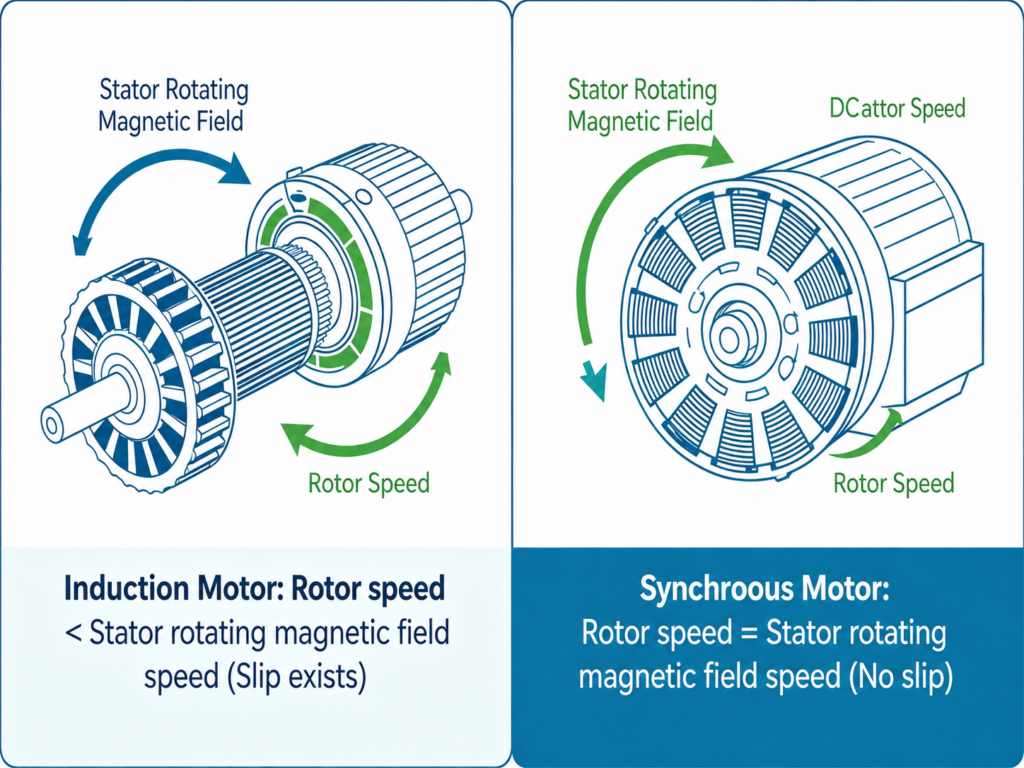
Per distinguere i motori a induzione dai motori sincroni, dobbiamo innanzitutto comprenderne la differenza più cruciale: la relazione tra la velocità di rotazione del rotore e la velocità di rotazione del campo magnetico dello statore. Solo in base a questi due aspetti possiamo definirli motori “sincroni” e “a induzione”. In parole semplici, la velocità di rotazione del rotore di un motore sincrono è sempre sincronizzata con la velocità di rotazione del campo magnetico dello statore, come due persone che si tengono per mano e corrono a passo costante, con passi perfettamente sincronizzati. Al contrario, la velocità di rotazione del rotore di un motore a induzione è sempre leggermente inferiore alla velocità di rotazione del campo magnetico dello statore, come qualcuno che insegue un compagno, sempre un piccolo passo indietro. Questa differenza di velocità è chiamata “slittamento” ed è la chiave della capacità di un motore a induzione di generare energia.
Motori a induzione: la soluzione affidabile e versatile
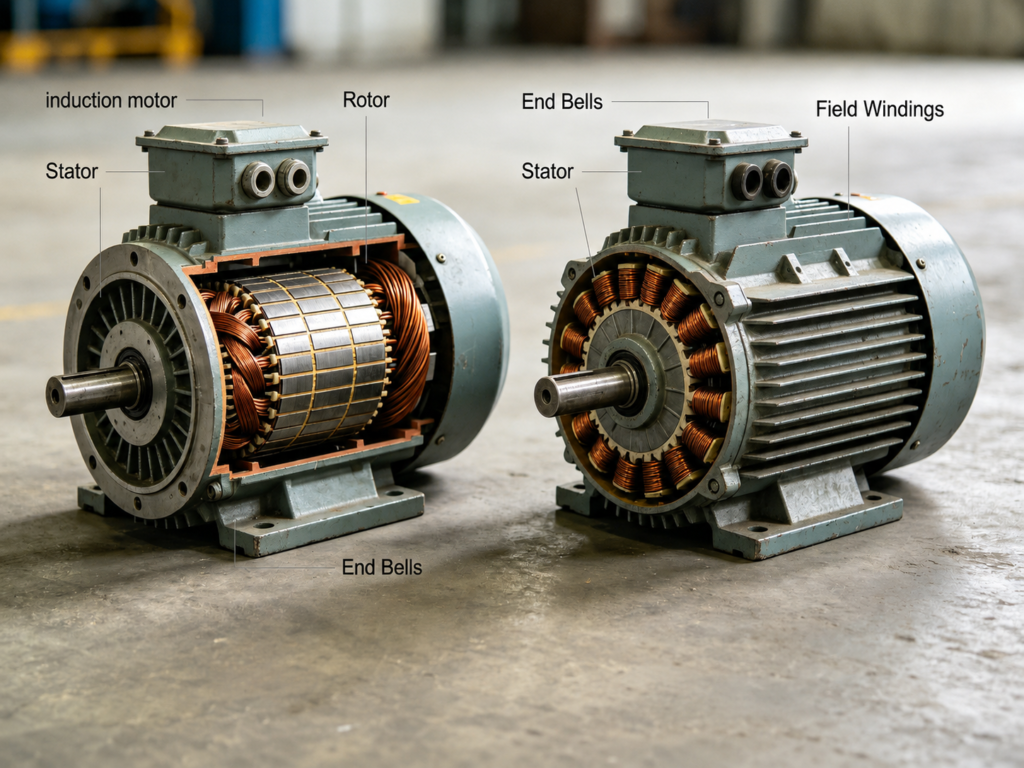
Struttura: semplice e robusta
La struttura di un motore a induzione è molto semplice, composta principalmente da statore e rotore, senza dispositivi aggiuntivi complessi. Lo statore è la parte fissa del motore, costituita da lamierini di acciaio al silicio sovrapposti, attorno ai quali sono avvolti avvolgimenti trifase. Quando viene applicata una corrente alternata, lo statore genera un campo magnetico rotante, che essenzialmente fornisce al rotore un punto di riferimento da inseguire. Il rotore è generalmente del tipo a gabbia di scoiattolo; come suggerisce il nome, dopo aver rimosso il nucleo di ferro, le barre conduttrici del rotore e gli anelli di cortocircuito alle due estremità vengono collegati, conferendogli una forma a gabbia. Di solito è realizzato in alluminio o rame fuso e la sua struttura è robusta e non facilmente danneggiabile. Esiste anche un tipo a rotore avvolto, con avvolgimenti trifase indipendenti sul rotore, che possono essere collegati a una resistenza esterna tramite anelli collettori, ma oggi è raramente utilizzato.
Principio di funzionamento: azionato per induzione elettromagnetica
Il suo principio di funzionamento si basa interamente sulla legge fondamentale dell’induzione elettromagnetica, da cui il nome motore a induzione. Quando una corrente alternata trifase viene applicata agli avvolgimenti dello statore, si genera un campo magnetico rotante. Questo campo magnetico si propaga rapidamente sui conduttori stazionari del rotore. Secondo la legge di Faraday sull’induzione elettromagnetica, quando un conduttore si muove in un campo magnetico, viene indotta una forza elettromotrice (FEM). I conduttori del rotore formano un circuito chiuso e questa FEM genera una corrente indotta. Questa corrente indotta, nel campo magnetico rotante, è soggetta a una forza elettromagnetica, generando così una coppia elettromagnetica che fa ruotare il rotore.
Un fenomeno chiave: lo “slittamento” che consente l’erogazione di potenza
Ecco un fenomeno interessante che potreste aver notato: il rotore raramente raggiunge la velocità del campo magnetico rotante dello statore. Se la velocità del rotore fosse esattamente uguale a quella del campo magnetico, non ci sarebbe alcun movimento relativo tra di loro. I conduttori del rotore non intersecherebbero le linee di forza magnetiche e, di conseguenza, non si potrebbe generare alcuna corrente indotta o coppia elettromagnetica, causando la perdita istantanea di potenza del rotore. Pertanto, la velocità del rotore di un motore a induzione deve essere leggermente inferiore alla velocità del campo magnetico; il loro slittamento è tipicamente compreso tra l’1% e il 5%. È questa piccola differenza che gli permette di erogare potenza in modo continuo. Ad esempio, il ventilatore elettrico nelle nostre case sembra ruotare senza intoppi, ma in realtà il rotore insegue costantemente il campo magnetico; la differenza di velocità è così piccola da essere impercettibile a occhio nudo.
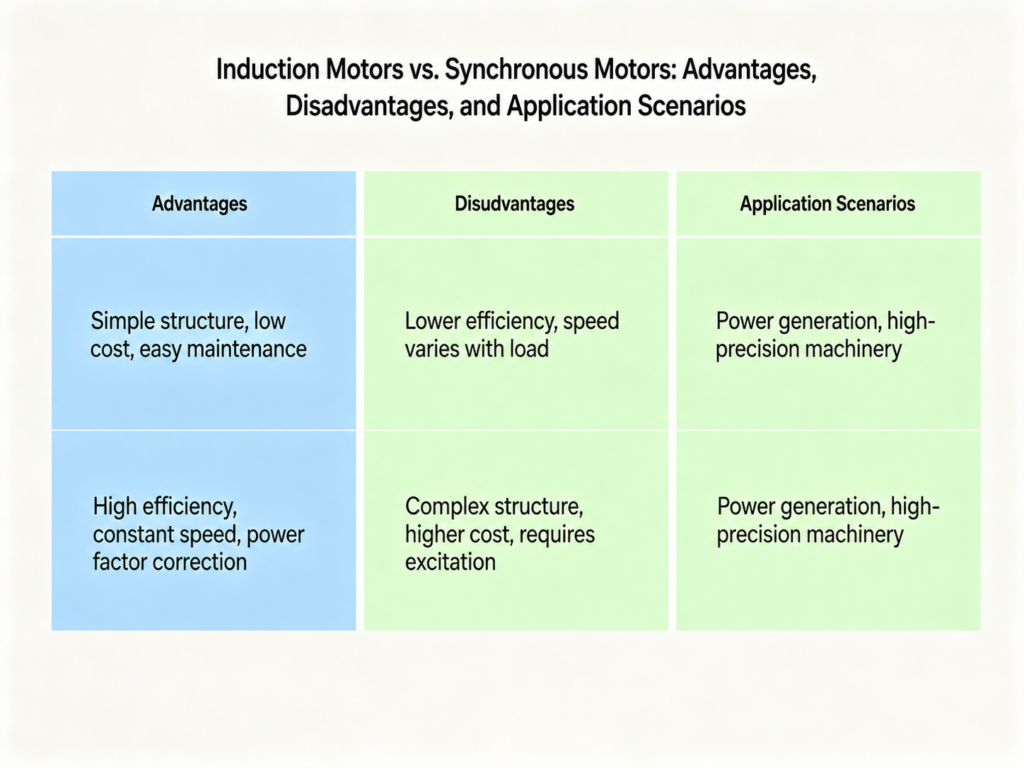
Vantaggi e svantaggi
I motori a induzione presentano numerosi vantaggi. Ad esempio, sono semplici e durevoli, richiedono una manutenzione minima, hanno bassi costi di produzione e possono avviarsi automaticamente senza dispositivi ausiliari aggiuntivi. In pratica, è sufficiente collegarli a una fonte di alimentazione per farli ruotare automaticamente, il che è fondamentale per la loro ampia diffusione nelle abitazioni e negli ambienti industriali in generale. Tuttavia, presentano anche alcuni svantaggi. Assorbono sempre potenza reattiva dalla rete per generare il campo magnetico rotante, con conseguente ritardo del fattore di potenza, che richiede condensatori aggiuntivi e altre apparecchiature di compensazione. Inoltre, con una frequenza fissa, la velocità diminuisce all’aumentare del carico, rendendo impossibile ottenere una velocità assolutamente costante. Infine, la loro regolazione della velocità non è precisa come quella dei motori sincroni. Sebbene la velocità possa essere regolata tramite conversione di frequenza e inversione di polarità, non è possibile raggiungere la massima efficienza in applicazioni ad alta precisione.
Applicazioni: Onnipresenti nella vita quotidiana e nell’industria
Dal punto di vista applicativo, i motori a induzione sono praticamente onnipresenti. Trovano impiego in svariate applicazioni, dagli elettrodomestici come compressori per condizionatori, lavatrici e ventilatori, alle apparecchiature industriali come ventilatori, pompe, nastri trasportatori e macchine utensili, fino a diverse attrezzature meccaniche nel settore minerario e agricolo. Come un vero e proprio tuttofare, non è esigente in termini di ambiente di lavoro né richiede un’elevata precisione. Ha solo bisogno di energia per erogarla silenziosamente. Inoltre, i motori a induzione possono funzionare in tre modalità: motore, generatore e frenatura elettromagnetica, sebbene nella maggior parte dei casi operino come motore.
Motori sincroni: l’esperto di precisione
Caratteristica principale: perfetta sincronizzazione
Dopo aver parlato dei motori a induzione, passiamo a parlare dell’esperto di precisione nel mondo dei motori: il motore sincrono. Se i motori a induzione privilegiano praticità e durata, i motori sincroni privilegiano precisione ed efficienza. Sono il cuore pulsante dei sistemi di alimentazione, in particolare insostituibili nella generazione di energia su larga scala e nelle applicazioni di azionamento ad alta precisione.
La caratteristica principale di un motore sincrono è la perfetta sincronizzazione tra la velocità del rotore e la velocità di rotazione del campo magnetico dello statore. Questo concetto è espresso dalla formula: n = ns = 60f/p, dove f è la frequenza di alimentazione e p è il numero di coppie di poli. Finché la frequenza della rete elettrica rimane fissa, la velocità del motore sincrono resta costante e non risente delle variazioni di carico. Come un soldato disciplinato che mantiene un ritmo costante indipendentemente dalla difficoltà del compito, questa caratteristica lo rende ideale in situazioni che richiedono velocità costante e alta precisione.
Struttura: più complessa, più varia
Rispetto ai motori a induzione, i motori sincroni presentano una struttura più complessa e una maggiore varietà di tipologie di rotore. I loro rotori richiedono una sorgente di campo magnetico indipendente e si dividono principalmente in tre tipologie: a bobina di eccitazione, a magneti permanenti e a riluttanza. Il rotore a bobina di eccitazione è costituito da avvolgimenti a spirale, alimentati da corrente continua tramite anelli collettori e spazzole; questa è la forma più comune nei motori sincroni di grandi dimensioni. Il rotore a magneti permanenti è composto da magneti permanenti come il neodimio-ferro-boro; non richiede un’eccitazione esterna in corrente continua e ha una struttura relativamente semplice, ampiamente utilizzata in apparecchiature di piccole e medie dimensioni, come i motori di trazione per veicoli elettrici. Il rotore a riluttanza è costituito da un nucleo di ferro di forma particolare; non presenta né avvolgimenti né magneti permanenti, generando coppia in base al principio della minima riluttanza magnetica, e il suo controllo è relativamente più complesso.
Principio di funzionamento: attrazione tra poli opposti
Il principio di funzionamento di un motore sincrono si basa sull’attrazione tra poli opposti. Quando una corrente alternata trifase viene applicata agli avvolgimenti dello statore, si genera un campo magnetico rotante. Il rotore genera un campo magnetico costante tramite eccitazione o magneti permanenti. Quando il numero di coppie di poli nel campo magnetico del rotore è uguale al numero di coppie di poli nel campo magnetico dello statore, il campo magnetico rotante dello statore agisce come un magnete, attraendo il campo magnetico del rotore e causandone la rotazione sincrona. Tuttavia, si presenta un piccolo problema: i motori sincroni non possono avviarsi direttamente perché la velocità di rotazione del campo magnetico dello statore è troppo elevata quando il rotore è fermo per portarlo istantaneamente alla velocità sincrona. Pertanto, è necessaria un’alimentazione ausiliaria per avviare gli avvolgimenti. Una volta che la velocità si avvicina alla velocità sincrona, viene applicata un’eccitazione in corrente continua per sincronizzare il rotore; in alternativa, si può utilizzare un convertitore di frequenza per aumentare gradualmente la frequenza di alimentazione da zero e ottenere un avviamento graduale.
Vantaggi e svantaggi
I vantaggi dei motori sincroni compensano con precisione le carenze dei motori a induzione. I motori sincroni a magneti permanenti (PMSM) possono regolare automaticamente il loro fattore di potenza. Modificando l’intensità della corrente di eccitazione del rotore, possono funzionare come compensatori induttivi, capacitivi o persino sincroni, erogando potenza reattiva alla rete e migliorandone il fattore di potenza, aspetto cruciale per la stabilità dei sistemi di alimentazione. A parità di potenza nominale, i PMSM offrono la massima efficienza grazie all’assenza di perdite per effetto Joule nel rotore, con conseguente riduzione del consumo energetico. Inoltre, la loro velocità costante e l’elevata precisione di regolazione soddisfano le esigenze degli azionamenti di alta precisione.
Tuttavia, i motori sincroni presentano anche degli svantaggi: costi di produzione più elevati, soprattutto a causa del prezzo elevato dei materiali a magneti permanenti; struttura complessa, che richiede un sistema di eccitazione e spazzole ad anello collettore, con conseguenti costi di manutenzione relativamente alti, poiché le spazzole ad anello collettore necessitano di una sostituzione periodica; e l’impossibilità di autoavviamento, che richiede un dispositivo di avviamento aggiuntivo. Queste caratteristiche ne limitano la diffusione rispetto ai motori a induzione, concentrandone le applicazioni in scenari che richiedono elevata precisione, efficienza e velocità costante.
Applicazioni: concentrate in settori di alta gamma
L’applicazione dei motori sincroni è concentrata principalmente in settori di fascia alta. Le centrali termiche, idroelettriche e nucleari utilizzano quasi esclusivamente generatori sincroni, convertendo l’energia meccanica in energia elettrica per fornire un’alimentazione stabile all’intera rete elettrica. Le grandi apparecchiature industriali, come compressori d’aria, ventilatori di grandi dimensioni e mulini a sfere, richiedono un funzionamento a velocità costante e sono sensibili al fattore di potenza, utilizzando tipicamente motori sincroni. Nella produzione di precisione, i mandrini delle macchine utensili a controllo numerico, le apparecchiature ad alta velocità e i sistemi di servoazionamento impiegano principalmente motori sincroni a magneti permanenti, sfruttando le loro capacità di controllo della velocità ad alta precisione per garantire l’accuratezza della lavorazione. Inoltre, i motori di trazione dei veicoli elettrici stanno adottando sempre più motori sincroni a magneti permanenti, bilanciando efficienza e potenza.
Motori a induzione vs. motori sincroni: nessuna superiorità assoluta, solo scelte adatte
Ormai dovreste essere in grado di distinguere chiaramente tra motori a induzione e motori sincroni. In realtà, non esiste una superiorità o inferiorità assoluta tra i due; semplicemente, ognuno ha i propri punti di forza e funzioni in campi diversi, completandosi a vicenda. In parole semplici, i motori a induzione sono come persone comuni affidabili e capaci: semplici nella struttura, economici e durevoli, responsabili della maggior parte delle esigenze di potenza quotidiane e industriali generali. I motori sincroni sono come professionisti meticolosi: altamente precisi, efficienti e in grado di regolare il fattore di potenza, affrontando sfide di potenza di fascia alta e ad alta precisione. Possiamo comprenderlo con una semplice analogia. Se paragoniamo i motori alle automobili, i motori a induzione sono come le berline familiari: economici, durevoli e adatti alle esigenze quotidiane della maggior parte delle persone. I motori sincroni, d’altra parte, sono come auto sportive di fascia alta o speciali
Veicoli ad alte prestazioni e di elevata precisione. Sebbene costosi e più complessi da manutenere, sono in grado di svolgere compiti impossibili per le auto ordinarie.
Conclusione: La forza complementare per una vita migliore
Nelle applicazioni pratiche, la scelta del motore dipende principalmente dai requisiti specifici. Più precisamente, per gli elettrodomestici e i macchinari industriali generici, dove la precisione della velocità non è fondamentale e i budget sono limitati, i motori a induzione rappresentano la scelta migliore. Per la generazione di energia su larga scala, la lavorazione di precisione e le apparecchiature di fascia alta che richiedono velocità costante, elevata precisione, alta efficienza o regolazione del fattore di potenza, i motori sincroni sono l’opzione migliore. Grazie ai progressi tecnologici, le prestazioni di entrambi i tipi di motori sono in costante miglioramento. Ad esempio, l’efficienza dei motori a induzione ad alta efficienza è in continuo aumento, mentre il costo dei motori sincroni a magneti permanenti sta gradualmente diminuendo. Le loro applicazioni si sovrappongono e si espandono sempre più, fornendo insieme un supporto energetico più solido ed efficiente per la nostra vita e la produzione industriale.
Nelle applicazioni pratiche, la scelta del motore dipende principalmente dai requisiti specifici. Più precisamente, per gli elettrodomestici e i macchinari industriali generici, dove la precisione della velocità non è fondamentale e i budget sono limitati, i motori a induzione rappresentano la scelta migliore. Per la generazione di energia su larga scala, la lavorazione di precisione e le apparecchiature di fascia alta che richiedono velocità costante, elevata precisione, alta efficienza o regolazione del fattore di potenza, i motori sincroni sono l’opzione migliore. Grazie ai progressi tecnologici, le prestazioni di entrambi i tipi di motori sono in costante miglioramento. Ad esempio, l’efficienza dei motori a induzione ad alta efficienza è in continuo aumento, mentre il costo dei motori sincroni a magneti permanenti sta gradualmente diminuendo. Le loro applicazioni si sovrappongono e si espandono sempre più, fornendo insieme un supporto energetico più solido ed efficiente per la nostra vita e la produzione industriale.