
- Casa
- Prodotto
- Motore standard GOST
- Motore standard IEC
 Motore asincrono monofase serie MY/MYT con condensatore di marcia
Motore asincrono monofase serie MY/MYT con condensatore di marcia- Motore asincrono monofase serie ML con doppio condensatore
- Motore trifase ad alta efficienza serie ME2 con carcassa in alluminio
- Motore trifase ad alta efficienza serie ME3 con carcassa in alluminio
- Motore trifase ad alta efficienza serie YE2 con carcassa in ghisa (IE2)
- Motore trifase ad alta efficienza serie YE3 con carcassa in ghisa (IE3)
- Motore asincrono monofase serie MC con avviamento a condensatore
- Motore trifase serie MS con carcassa in alluminio (IE1)
- Motore trifase serie Y2 con carcassa in ghisa (IE1)
- Motore per applicazioni speciali
- Motore per porta avvolgibile
- Applicazione industriale
- Notizie
- Chi siamo
- Contattaci














Motori a corrente alternata vs. motori a corrente continua senza spazzole: un confronto tra principi, applicazioni e sviluppo.
Introduzione
Contenuto principale: Introdurre la popolarità dei motori nella moderna produzione industriale e nella vita quotidiana, sottolineare che i motori a corrente alternata (AC) e i motori a corrente continua senza spazzole (brushless DC) sono i due tipi di motori più diffusi, evidenziare il problema della frequente confusione tra i due e chiarire che questo articolo analizzerà le caratteristiche principali, le differenze, le applicazioni e lo sviluppo dei due tipi di motori per aiutare i lettori a comprenderli intuitivamente.
I. Definizioni di base, strutture principali e principi di funzionamento dei due tipi di motori
1.1 Motori a corrente alternata
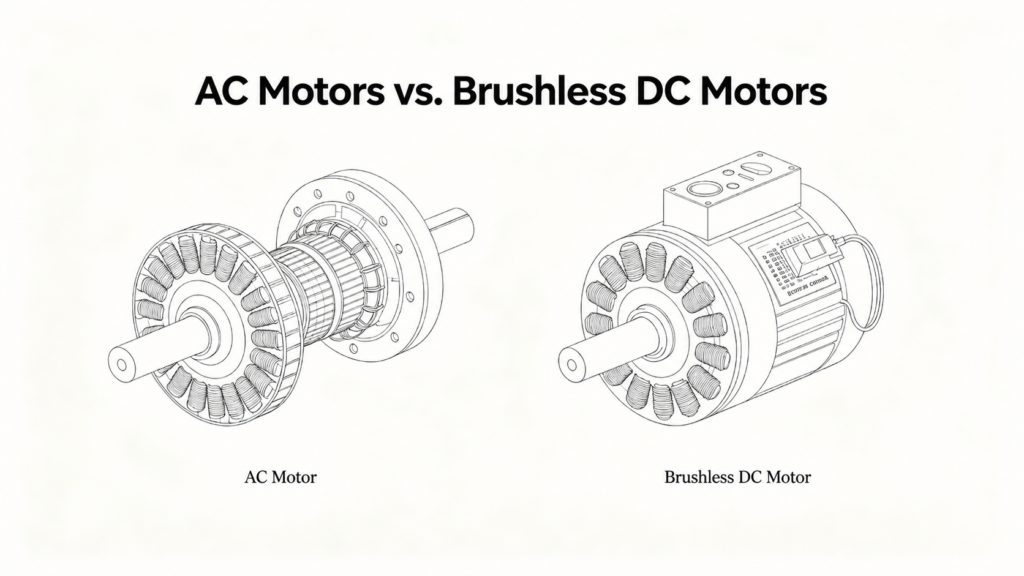
Contenuto principale: Si basano sulla corrente alternata e realizzano la conversione di energia tramite induzione elettromagnetica; vantano una lunga storia, una tecnologia matura e un basso costo. La struttura di base è costituita da uno statore (fisso, composto da un nucleo di ferro e avvolgimenti, che genera un campo magnetico rotante quando alimentato da corrente alternata) e da un rotore (posizionato nel campo magnetico rotante, che ruota sotto l’azione della forza magnetica per produrre energia meccanica). In base alla struttura del rotore e al principio di funzionamento, i motori a corrente alternata si dividono in due categorie principali: motori asincroni e motori sincroni.
1.1.1 Motori asincroni
Contenuto principale: Il tipo più comune; il rotore non richiede un’alimentazione esterna e si basa sul campo magnetico rotante dello statore per tagliare gli avvolgimenti del rotore e generare corrente indotta e coppia elettromagnetica. Ha una struttura semplice (il rotore è per lo più una struttura a gabbia saldata con conduttori in alluminio o rame, senza avvolgimenti o spazzole), basso costo, resistenza agli urti e alta affidabilità, e può funzionare stabilmente a lungo in ambienti difficili come polvere e umidità. Gli scenari di applicazione includono ventilatori per l’aerazione industriale, pompe di circolazione dell’acqua per l’aria condizionata centralizzata, lavatrici domestiche e ventilatori elettrici, con un ampio intervallo di potenza adattabile (da pochi watt a centinaia di kilowatt).
1.1.2 Motori asincroni a rotore avvolto
Contenuto principale: Gli avvolgimenti del rotore possono essere collegati a resistori esterni tramite anelli collettori e la resistenza del rotore può essere regolata per modificare la coppia di avviamento e la regolazione della velocità. La coppia di avviamento è superiore del 30%-50% rispetto a quella dei motori a gabbia di scoiattolo, con una regolazione della velocità flessibile e un costo relativamente basso. È adatto per scenari che richiedono avviamenti a carico elevato e frequenti regolazioni della velocità, come gru a ponte e frantoi per miniere.
1.1.3 Motori sincroni
Contenuto principale: La velocità del rotore è sincronizzata con il campo magnetico rotante dello statore; il rotore richiede solitamente un’alimentazione di eccitazione in corrente continua (i motori sincroni a magneti permanenti, PMSM, non necessitano di eccitazione esterna). I PMSM possono regolare automaticamente il fattore di potenza, migliorare la qualità della rete elettrica e presentano una maggiore efficienza nelle applicazioni ad alta potenza, risultando adatti per apparecchiature di grandi dimensioni superiori a 1000 kW (come i compressori di ammoniaca negli impianti petrolchimici e gli azionamenti principali dei laminatoi a caldo negli impianti siderurgici). Allo stesso tempo, offrono elevata efficienza e densità di potenza, risultando adatti per scenari di alta precisione come le apparecchiature per semiconduttori e le giunzioni dei robot industriali.
1.2 Motori CC senza spazzole
Contenuto principale: Evoluzione dei motori a corrente continua con spazzole, il miglioramento principale consiste nell’eliminazione di spazzole e collettori, adottando la commutazione elettronica, che risolve i problemi di usura, rumorosità e breve durata dei motori con spazzole. In sostanza, appartiene alla categoria dei motori sincroni a commutazione elettronica, alimentati da corrente continua, ma che la convertono internamente in corrente alternata tramite componenti elettronici per il funzionamento.
1.2.1 Struttura centrale
Componenti principali: Composto da statore e rotore, con una struttura più compatta. Lo statore è un nucleo di ferro con avvolgimenti trifase (simile allo statore di un motore a corrente alternata, ma con metodi di avvolgimento e logica di controllo differenti). Il rotore è composto da magneti permanenti, senza avvolgimenti né alimentazione di eccitazione (la principale differenza rispetto al rotore di un motore a corrente alternata). Un sensore di posizione è necessario per rilevare la posizione del rotore e trasmettere il segnale al controllore. Il controllore gestisce la sequenza di eccitazione degli avvolgimenti dello statore tramite un inverter per realizzare la commutazione elettronica e garantire il funzionamento stabile del motore.
1.2.2 Principio di funzionamento
Contenuto principale: Un alimentatore CC esterno è collegato al controller. In base al segnale del sensore, il controller converte la corrente continua in corrente alternata trifase tramite un inverter, che viene poi fornita agli avvolgimenti dello statore per generare un campo magnetico rotante. I magneti permanenti del rotore ruotano sotto l’azione di questo campo magnetico e il sensore fornisce un feedback di posizione in tempo reale. Il controller regola continuamente la sequenza di alimentazione per garantire che il campo magnetico sia sincronizzato con il rotore, ottenendo così un’erogazione di potenza continua. Rispetto ai motori a spazzole, i motori CC brushless non presentano usura delle spazzole, bassa rumorosità, lunga durata e migliori prestazioni e precisione nella regolazione della velocità.
1.2.3 Differenze rispetto ai motori sincroni a magneti permanenti (PMSM)
Contenuto principale: Entrambi sono motori a magneti permanenti e, sebbene le loro strutture siano simili, presentano differenze significative. I motori brushless a corrente continua hanno magneti del rotore a forma di arco, densità di flusso nel traferro trapezoidale e corrente di statore trapezoidale. Possono essere controllati tramite sensori ad effetto Hall, offrendo un controllo semplice ed economico, ma con una significativa ondulazione di coppia. I motori sincroni a magneti permanenti, d’altra parte, hanno superfici polari dei magneti del rotore paraboliche, densità di flusso sinusoidale e corrente di statore sinusoidale. Richiedono encoder fotoelettrici di precisione, che offrono un’elevata precisione di controllo e una bassa ondulazione di coppia, ma a un costo maggiore. La scelta richiede un equilibrio tra requisiti di precisione e costi.
II. Confronto delle prestazioni principali, vantaggi e svantaggi
2.1 Motori CA
2.1.1 Vantaggi
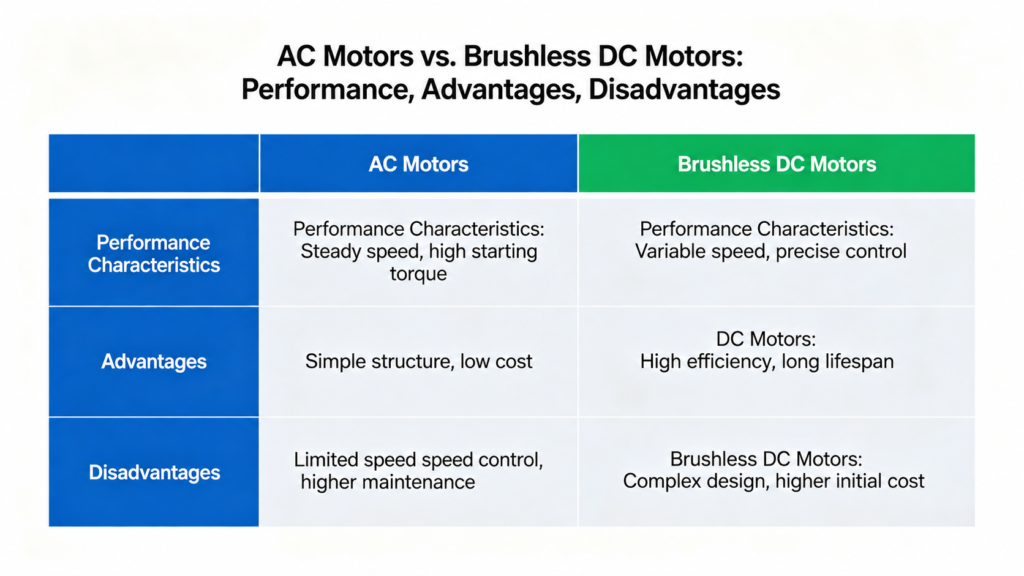
Caratteristiche principali: In primo luogo, struttura semplice, soprattutto per i motori asincroni privi di complessi componenti di controllo elettronico, con conseguente basso tasso di guasti e manutenzione agevole, che consente un funzionamento continuo per anni senza necessità di interventi. In secondo luogo, costi relativamente bassi; la tecnologia consolidata e il semplice processo produttivo rendono i costi di produzione e manutenzione molto inferiori rispetto ai motori brushless a corrente continua. In terzo luogo, elevata adattabilità, con una gamma di potenza che va da pochi watt a decine di megawatt, e capacità di resistere ad ambienti difficili come alte temperature e polvere, il che li rende un elemento fondamentale della produzione industriale.
2.1.2 Svantaggi
Contenuto principale: Scarse prestazioni nella regolazione della velocità; la velocità dei motori asincroni è fortemente influenzata dalla frequenza di alimentazione e dal carico. Sebbene i convertitori di frequenza possano migliorare questo aspetto, la loro precisione e velocità di risposta non sono paragonabili a quelle dei motori brushless a corrente continua. L’efficienza diminuisce e il consumo energetico aumenta in condizioni di bassa velocità e carico ridotto. La bassa densità di potenza si traduce in dimensioni e peso maggiori a parità di potenza erogata, rendendoli inadatti ad applicazioni con requisiti stringenti in termini di dimensioni e peso.
2.2 Motori CC senza spazzole
2.2.1 Vantaggi
Contenuto principale: I principali vantaggi risiedono nelle prestazioni di controllo e nella durata. Ampia gamma di velocità, che consente una regolazione fluida, elevata precisione e risposta rapida, soddisfacendo le esigenze di un controllo preciso. Elevata efficienza, che si mantiene elevata anche a basse velocità e carichi leggeri, in linea con le tendenze al risparmio energetico. Bassa rumorosità, con un funzionamento da 10 a 15 dB più silenzioso rispetto ai motori a spazzole grazie all’assenza di attrito delle spazzole, consentendo un funzionamento silenzioso. Lunga durata e costi di manutenzione estremamente bassi. Elevata densità di potenza, dimensioni ridotte e peso contenuto, adatto per apparecchiature di piccole dimensioni.
2.2.2 Svantaggi
Contenuto principale: Costo più elevato, che richiede controllori e sensori, e il costo relativamente alto dei magneti permanenti, che è il motivo principale per cui non possono sostituire completamente i motori a corrente alternata. Struttura e logica di controllo più complesse; un guasto al controllore può causare l’arresto del motore e le riparazioni sono più difficili. Sensibili alla temperatura e alle vibrazioni, il che li rende inadatti ad ambienti industriali difficili.
III. Scenari di applicazione pratica
3.1 Motori CA
Contenuto principale: Grazie alla loro semplicità, al basso costo e all’affidabilità, i motori asincroni sono utilizzati principalmente in scenari in cui non è richiesta un’elevata precisione nel controllo della velocità e si necessita di un funzionamento stabile a lungo termine. Nel settore industriale, i motori asincroni sono ampiamente utilizzati in ventilatori, pompe, nastri trasportatori e altre applicazioni. I motori a rotore avvolto sono utilizzati per apparecchiature di avviamento per impieghi gravosi, mentre i motori sincroni sono impiegati in apparecchiature di grandi dimensioni e ad alta potenza. Nella vita quotidiana, elettrodomestici di fascia medio-bassa come lavatrici, ventilatori e compressori per condizionatori d’aria, così come infrastrutture come l’approvvigionamento idrico urbano e l’irrigazione agricola, si affidano tutti ai motori a corrente alternata per il loro funzionamento.
3.2 Motori CC senza spazzole
Contenuto principale: Utilizzati in applicazioni con requisiti rigorosi in termini di precisione del controllo della velocità, efficienza, rumorosità e dimensioni, il loro campo di applicazione è in continua espansione. Nell’automazione industriale, vengono utilizzati per generare motori a rulli nelle linee di produzione automatizzate e per azionare robot di smistamento, garantendo un controllo preciso. Nella robotica, sono impiegati nelle giunzioni dei robot collaborativi e nelle ruote motrici dei robot mobili AGV, garantendo movimenti flessibili grazie all’elevata densità di coppia e alla rapida risposta. Nella vita quotidiana, gli elettrodomestici di fascia alta li utilizzano per azionare le ventole, raggiungendo livelli di rumorosità bassi fino a 22 dB e un notevole risparmio energetico. Anche piccoli dispositivi come droni, spazzolini elettrici e rasoi beneficiano delle loro dimensioni ridotte e della lunga durata, che ne consentono un funzionamento stabile. In campo medico, apparecchiature come tomografi computerizzati e ventilatori si basano su bassa rumorosità e alta precisione. Nel settore dei veicoli a energia alternativa, il sistema di trazione della Tesla Model 3 utilizza un motore brushless a corrente continua con un’efficienza del 97% e un tasso di recupero dell’energia in frenata del 23%. Anche il servosterzo elettrico e i compressori per l’aria condizionata utilizzano questo tipo di motore.
IV. Tendenze di sviluppo dei due tipi di motori
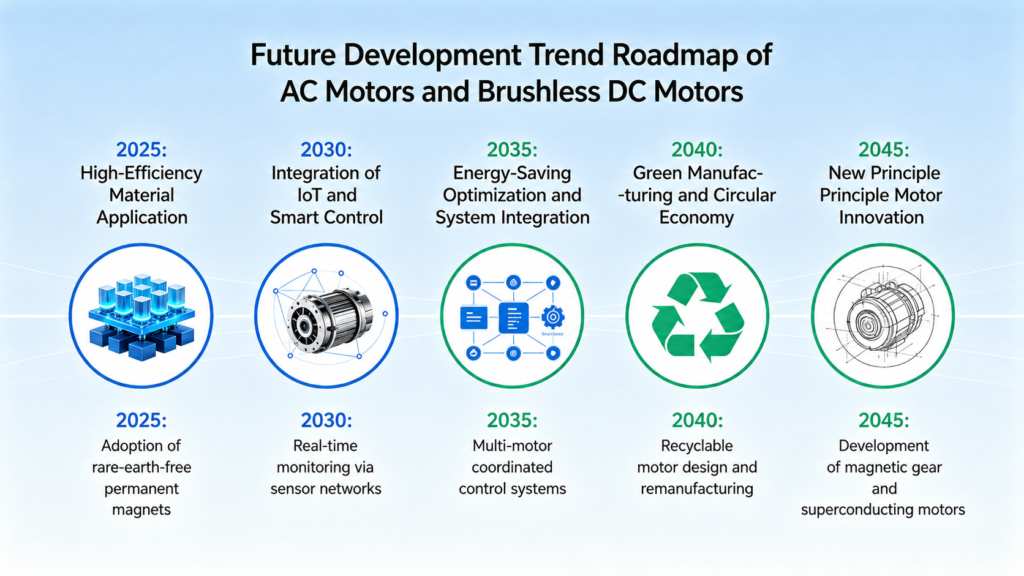
Contenuto principale: Grazie ai progressi tecnologici, entrambi i tipi di motori si stanno evolvendo verso una maggiore efficienza, risparmio energetico e intelligenza. I motori a corrente alternata (AC) migliorano l’efficienza grazie a una struttura ottimizzata e all’utilizzo di materiali ad alta efficienza, e ottimizzano le prestazioni di controllo della velocità grazie alla tecnologia di controllo della velocità a frequenza variabile (VFR). Si stanno inoltre evolvendo verso dimensioni maggiori e una maggiore intelligenza, consentendo il monitoraggio remoto e la segnalazione di guasti. I motori brushless a corrente continua (DC), d’altro canto, riducono i costi grazie ai progressi nei materiali a magneti permanenti e nei componenti elettronici, ottimizzano gli algoritmi di controllo per ridurre le pulsazioni di coppia e si stanno sviluppando verso la miniaturizzazione e l’integrazione, combinando motore, controller e sensori in un’unica unità, ampliando così il loro campo di applicazione.
V. Suggerimenti per lo sviluppo futuro e la selezione
5.1 Sviluppi futuri
Contenuto principale: Molti si chiedono quale di questi due tipi di motori sostituirà l’altro in futuro. In realtà, sono complementari e simbiotici, ognuno con un ruolo specifico nei propri ambiti di applicazione. I motori a corrente alternata (AC) continueranno a dominare nella produzione industriale, nelle infrastrutture e negli elettrodomestici di fascia medio-bassa; i motori a corrente continua senza spazzole (brushless DC) aumenteranno ulteriormente la loro popolarità negli elettrodomestici di fascia alta, nell’automazione industriale e nei veicoli a energia alternativa. Con i progressi tecnologici, il divario tra motori AC e motori brushless DC si ridurrà ulteriormente e in futuro potrebbero emergere nuovi tipi di motori che combinano i vantaggi di entrambi, per soddisfare le esigenze di applicazioni sempre più diversificate.
5.2 Suggerimenti per la selezione
Contenuto principale: Nella scelta pratica, è necessario considerare lo scenario, i requisiti e i costi. Per le grandi apparecchiature industriali con budget limitati e requisiti di precisione di controllo a bassa velocità, è preferibile optare per i motori a corrente alternata (AC). Per gli elettrodomestici di fascia alta, le apparecchiature di precisione e i veicoli a energia alternativa, dove precisione, efficienza e dimensioni sono cruciali e i budget sono consistenti, è preferibile scegliere i motori brushless a corrente continua (DC). Allo stesso tempo, è necessario considerare i costi di manutenzione e l’adattabilità del motore alle variazioni ambientali; i motori AC sono preferibili per ambienti difficili, mentre i motori brushless a corrente continua sono più indicati per applicazioni di controllo di precisione.
Conclusione
Contenuto principale: In sintesi, sia i motori a corrente alternata (AC) che i motori a corrente continua senza spazzole (brushless DC) sono dispositivi di potenza vitali nella società moderna. I motori AC sono tecnologicamente maturi, affidabili e durevoli, e rappresentano le fondamenta della produzione industriale; mentre i motori brushless DC sono altamente efficienti, intelligenti, compatti e silenziosi, e guidano lo sviluppo di apparecchiature di fascia alta. Con il progresso tecnologico, entrambi continueranno a migliorare, apportando maggiore praticità alla produzione e alla vita quotidiana e spingendo la società verso l’efficienza, il risparmio energetico e l’intelligenza. Il loro sviluppo è inscindibile dall’innovazione tecnologica e dai fattori guidati dalla domanda, che trasformano costantemente le nostre vite e spingono in avanti la civiltà industriale.