
- Home
- Product
- GOST standard motor
- IEC standard motor
 MC Series single phase capacitor start asynchronous motor
MC Series single phase capacitor start asynchronous motor- MY MYT series single phase capacitor running asynchronous motor
- ML Series single phase dual-capacitor asynchronous motor
- ME2 series three phase high efficiency aluminum housing motor(IE2)
- ME3 series three phase high efficiency aluminum housing motor(IE3)
- MS series three-phase aluminum housing motor (IE1)
- Y2 series three phase cast iron motor (IE1)
- YE2 series three phase high efficiency cast iron motor (IE2)
- YE3 series three phase high efficiency cast iron motor (IE3)
- Special application motor
- Rolling door motor
- Industry application
- News
- About us
- Contact us
- Certifications













Servo Motors vs. Induction Motors
In industrial automation, intelligent manufacturing, and various power drive scenarios, motors, as core components for converting electrical energy into mechanical energy, directly determine the operating accuracy, efficiency, and stability of equipment. Servo motors and induction motors are the two most widely used types of motors, dominating the fields of high-precision control and general-purpose power drive, respectively. Servo motors prioritize precise controllability, following the path of refined development in high-end manufacturing; while induction motors emphasize stability, reliability, and cost-effectiveness, becoming the “power cornerstone” in industrial production and civilian applications. This article comprehensively analyzes the differences and relationships between the two types of motors from aspects such as structural composition, working principle, core characteristics, application scenarios, and selection principles, providing a reference for selection in practical applications.
1. Core Positioning and Classification Overview of Motors
A motor is an electromagnetic device that converts electrical energy into mechanical energy based on the law of electromagnetic induction. According to its application, it can be divided into power motors and control motors. Induction motors belong to the category of power motors, their core function being the conversion of electrical energy into mechanical energy to provide continuous and stable power for various equipment. Induction motors are now widely used in general machinery, home appliances, and power systems. Servo motors, on the other hand, belong to the category of control motors. Their core function is to precisely achieve closed-loop control of position, speed, and torque under the action of control signals. They are high-end automation equipment and core actuators in precision manufacturing equipment.
From a market application perspective, induction motors, with their advantages of simple structure and high reliability, have gradually occupied more than 70% of the global industrial motor market share and have become the most fundamental power source in industrial production. Servo motors are now seeing their application increase with the demand for industrial automation upgrades, and their applications in high-end machine tools and industrial robots are becoming increasingly widespread, becoming an important indicator of manufacturing prowess. The two types of motors have different application focuses, complementing each other and jointly supporting the diversified needs of industrial production.
2. Structural Differences Between Servo Motors and Induction Motors
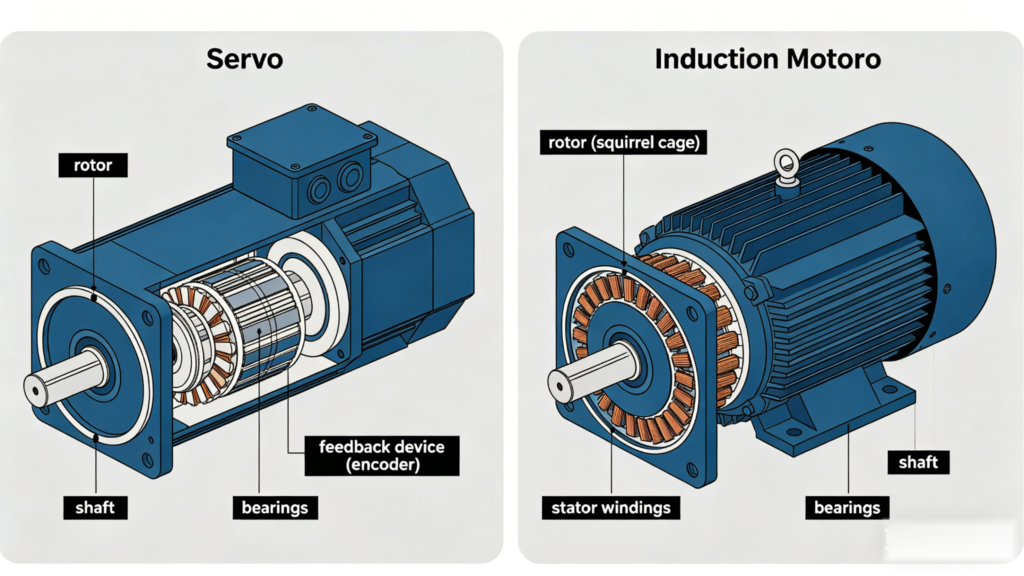
As is well known, different motor structures lead to different motor performance. Although both types of motors consist of basic components such as stators, rotors, housings, and bearings, the design, materials, and functions of their core components differ significantly, which is the fundamental reason for their performance differences.
2.1 Structural Composition of Servo Motors
A servo motor is a complete control-execution system. In addition to the motor body, it can integrate high-precision feedback elements and requires a dedicated servo driver to achieve precise control across all three parties.
The first component is the motor body. The stator is made of multiple layers of insulated silicon steel sheets, with embedded three-phase windings. Applying alternating current generates a rotating magnetic field. The rotor typically uses neodymium iron boron permanent magnets arranged in a specific number of pole pairs to improve efficiency and response speed. The housing is sealed, balancing heat dissipation, vibration resistance, and sealing, making it suitable for complex industrial environments.
The second component is the feedback element, which is the motor’s “eye.” It collects the rotor’s position and speed information in real time and feeds it back to the driver. Incremental encoders determine position using pulse count, but require a reference point; absolute encoders directly output a unique position code, retaining it even after power loss. High-precision systems mostly use 17-bit or higher models, achieving nanometer-level positioning.
The third component is the servo driver, which acts as the brain, composed of a DSP main control unit and power conversion module. It primarily receives instructions from the host computer and provides feedback from the encoder, using a triple closed-loop control algorithm to adjust output voltage and current, ensuring precise motor operation. It also integrates overvoltage and overcurrent protection functions.
2.2 Structural Composition of Induction Motors
Induction motors have a relatively simple structure. They do not require feedback elements or dedicated drivers; the core components are only the stator, rotor, and housing. The design prioritizes simplicity and robustness.
First, the stator. Its structure is similar to that of a servo motor stator, but the winding design focuses more on power output efficiency. The wire diameter and number of turns are designed according to the rated power to ensure long-term operational stability.
Secondly, there’s the rotor, which can be divided into squirrel-cage and wound-rotor types. The squirrel-cage type is the most widely used; it consists of guide bars and annular end rings, manufactured using a cast aluminum process, resulting in a simple structure and relatively low failure rate. The wound-rotor type’s rotor windings can be led out through slip rings and brushes, and resistors can be connected to improve starting and speed regulation performance. It is suitable for high-power and frequent-start scenarios.
Finally, there are auxiliary components. The housing is mostly made of cast iron, offering excellent heat dissipation. Wear-resistant deep groove ball bearings are used, facilitating maintenance. High-power models can be equipped with cooling fans to ensure heat dissipation under high loads. Its simple structure brings advantages in cost and reliability.
2.3 Summary of Core Structural Differences
Servo motors use closed-loop control as their core, resulting in a complex and costly structure. Induction motors prioritize simplicity and reliability, requiring no feedback elements or dedicated drivers, resulting in a simpler structure and lower cost. This difference directly determines the differences in control accuracy and response speed between the two.
3. Differences in Working Principles between Servo Motors and Induction Motors
Both types of motors operate based on the law of electromagnetic induction, but their different structures lead to fundamental differences in energy conversion methods and control logic: Induction motors achieve a simple conversion of electrical energy to mechanical energy, requiring no precise control; servo motors, on the other hand, achieve precise motion control through closed-loop feedback.
3.1 Working Principle of Servo Motors
Servo motors are essentially driven by electromagnetic induction under closed-loop control. The core mechanism eliminates errors through triple closed-loop control, with four steps: First, the driver receives and parses control commands from the host computer; second, a specific alternating current is applied to the stator windings, generating a rotating magnetic field that drives the rotor permanent magnet to rotate; third, the encoder collects and feeds back actual operating parameters; fourth, the driver adjusts the output based on the error, correcting the rotor’s operating state. Its start/stop response is at the millisecond level, and its overload capacity can reach three times the rated torque, meeting the requirements of high-speed and high-precision control.
3.2 Working Principle of Induction Motors
Induction motors achieve open-loop drive based on “electromagnetic induction”: Alternating current is applied to the three-phase stator windings to generate a synchronous rotating magnetic field. The rotor conductors, due to relative motion with the magnetic field, generate an induced current, which is then driven to rotate by electromagnetic force. Slip is its key characteristic. During normal operation, the slip ranges from 0.01 to 0.05, causing the speed to fluctuate with the load. Naturally, its speed regulation performance is poor. When paired with a frequency converter, stepless speed regulation can be achieved, but its accuracy is far inferior to that of a servo motor, and its efficiency and power factor are low under light loads.
3.3 Summary of Core Differences in Working Principles
Servo motors are closed-loop control drives, capable of real-time error correction; induction motors are open-loop power drives, only providing power output. These differences in their operating principles determine their different applicable scenarios.
4. Comparison of Core Characteristics of Servo Motors and Induction Motors
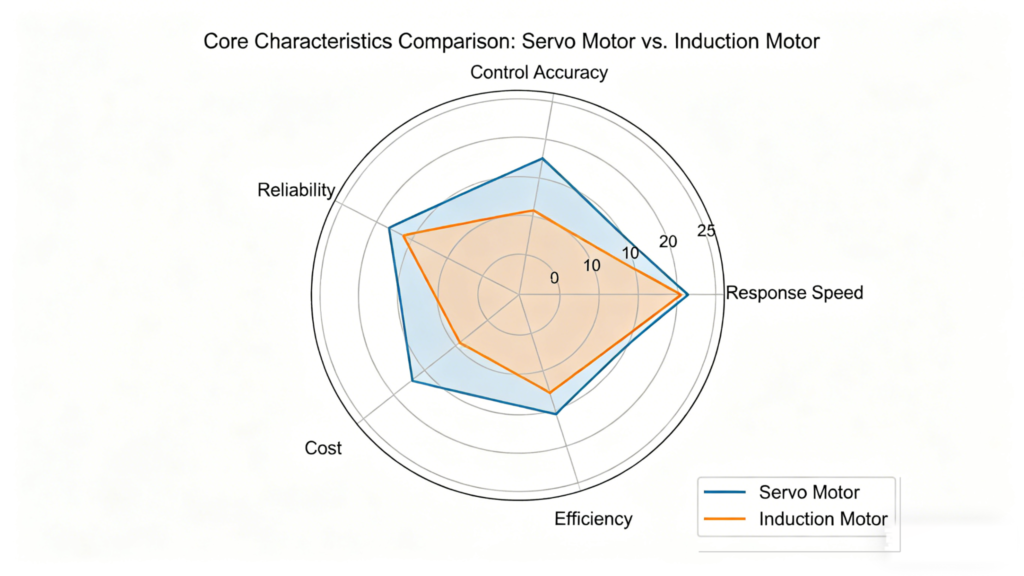
Due to differences in structure and principle, servo motors and induction motors have significant differences in their core characteristics, which directly determine their applicable scenarios. A specific comparison is as follows:
4.1 Control Accuracy
Servo motors have very high accuracy, determined by the encoder resolution. They can achieve nanometer-level positioning and precise speed control below 0.1 r/min, relying on triple closed-loop control to eliminate errors, making them suitable for various scenarios such as precision assembly. Induction motors use open-loop control, with a speed accuracy of only ±1% to ±5%, and even with a frequency converter, it only reaches ±0.5%, which cannot meet high-precision requirements.
4.2 Response Speed
Servo motors have a start-stop response time of 10-50 milliseconds, excellent acceleration performance, and are suitable for high-speed, frequent start-stop scenarios. Induction motors need to overcome significant inertia to start, with a response time of several seconds to tens of seconds, making them suitable for long-term continuous operation scenarios that do not require frequent start-stops.
4.3 Efficiency and Energy Consumption
Servo motors have an efficiency between 90% and 98%, maintaining high efficiency even under light loads. Their power factor is close to 1, resulting in low energy consumption. Induction motors have an efficiency between 75% and 90%, but this drops significantly under light loads. Their power factor is between 0.7 and 0.9. Under rated load, the energy consumption difference between servo motors and induction motors is not significant.
4.4 Cost and Maintenance
Servo motors cost 3 to 5 times more than induction motors of the same power. The encoder and driver account for a larger proportion of the cost, making maintenance more complex and requiring regular calibration by professionals. Induction motors cost only 1/3 to 1/5 of the cost, have a simple structure, low failure rate, and only require regular checks for lubrication and heat dissipation, resulting in extremely low maintenance costs.
4.5 Reliability and Environmental Adaptability
Servo motors have a more complex structure, and their precision components have high environmental requirements, being susceptible to high temperatures, dust, and vibration. Induction motors have a more robust structure, lack precision parts, and can adapt to harsh industrial environments, resulting in a lower failure rate over long-term operation.
4.6 Load Characteristics
Servo motors have strong overload capacity, making them suitable for scenarios with large load fluctuations and frequent acceleration/deceleration. Induction motors have weaker overload capacity, making them suitable for constant load scenarios without severe impacts.
5. Application Scenarios of Servo Motors and Induction Motors
5.1 Typical Application Scenarios of Servo Motors
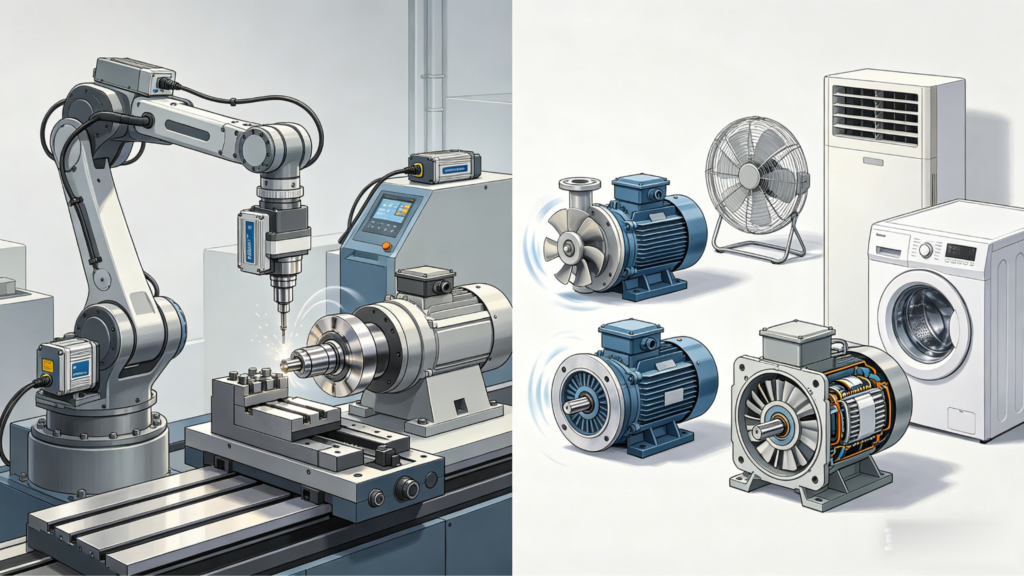
Servo motors emphasize high precision, high response, and high overload capacity, primarily used in high-end manufacturing and automation scenarios: industrial robots, CNC machine tools, semiconductor equipment, electronic manufacturing equipment, and new energy equipment. They are also used in precision instruments and medical equipment.
5.2 Typical Application Scenarios of Induction Motors
Induction motors, with their simplicity, reliability, and high cost-effectiveness, are used in general power drive scenarios: general industrial equipment (pumps, fans, conveyor belts, etc., basic power sources), household appliances (washing machines, air conditioners, etc., meeting daily power needs), power systems and rail transportation (cooling fans, etc., adaptable to high power requirements), agricultural machinery (tractors, water pumps, etc., resistant to harsh environments). Furthermore, Tesla’s Model S/X drive system also uses induction motors, expanding its high-end applications.
6. Selection Principles and Considerations for Servo Motors and Induction Motors
6.1 Core Selection Principles
- By Control Precision: Select a servo motor for precise control, and an induction motor for power drive only.
- By Load Characteristics: Select a servo motor for large load fluctuations and frequent start-stop operations, and an induction motor for constant loads and long-term operation.
- By Cost Budget: Select a servo motor for sufficient budget and high precision, and an induction motor for limited budget and high reliability, while also considering long-term energy consumption.
- By Environmental Conditions: Select an induction motor for harsh environments, and a servo motor with proper protection for clean, high-precision scenarios.
6.2 Selection Considerations
The selection of a servo motor should clearly define control requirements, match the precision of the encoder and driver, and also consider the load inertia ratio. The selection of an induction motor requires determining the power and number of poles, matching the inverter according to specific needs, prioritizing high-efficiency ratings such as IE3/IE4, and installing it accordingly to meet customer requirements.
7. Industry Development Trends and Future Outlook
With the promotion of industrial automation and energy-saving and environmental protection policies, both types of motors are striving to develop towards higher precision, higher efficiency, and intelligence. Servo motors focus on high precision, high response, miniaturization, lightweight design, and intelligent energy saving. They expand into relatively high-end applications by combining AI and multi-axis synchronization technology. Induction motors, on the other hand, emphasize improved energy efficiency, more intelligent upgrades, and specialized development, allowing them to adapt smoothly to the needs of different industries. Meanwhile, the emergence of integrated products such as servo and induction motors combines the advantages of both while expanding into mid-range control scenarios.
8. Conclusion
Servo motors and induction motors each have their advantages. Servo motors utilize precise controllability to support high-end manufacturing, while induction motors provide stable and cost-effective power supply for general applications. In practical applications, we should make scientific selections based on control precision, load characteristics, cost budget, and environmental conditions. In the future, servo motors and induction motors will continue to be optimized and upgraded, providing stronger power support for industrial automation and intelligent manufacturing, and driving equipment towards high efficiency, precision, and reliability.