
- Inicio
- Producto
- Motor estándar GOST
- Motor estándar IEC
 Motor monofásico serie MC con arranque por condensador
Motor monofásico serie MC con arranque por condensador- Motor monofásico serie MY/MYT con condensador permanente
- Motor monofásico serie ML con doble condensador asíncrono
- Motor trifásico serie ME2 con carcasa de aluminio de alta eficiencia (IE2)
- Motor trifásico serie ME3 con carcasa de aluminio de alta eficiencia (IE3)
- Motor trifásico serie Y2 con carcasa de hierro fundido (IE1)
- Motor trifásico serie MS con carcasa de aluminio (IE1)
- Motor trifásico serie YE2 con carcasa de hierro fundido de alta eficiencia (IE2)
- Motor trifásico serie YE3 con carcasa de hierro fundido de alta eficiencia (IE3)
- Motor para aplicaciones especiales
- Motor para puerta enrollable
- Aplicación industrial
- Noticias
- Sobre nosotros
- Contáctanos














Servomotores frente a motores de inducción
En la automatización industrial, la fabricación inteligente y diversos escenarios de accionamiento eléctrico, los motores, como componentes clave para la conversión de energía eléctrica en energía mecánica, determinan directamente la precisión, la eficiencia y la estabilidad operativa de los equipos. Los servomotores y los motores de inducción son los dos tipos de motores más utilizados, dominando los campos del control de alta precisión y el accionamiento eléctrico general, respectivamente. Los servomotores priorizan la precisión de control, siguiendo la senda del desarrollo refinado en la fabricación de alta gama; mientras que los motores de inducción enfatizan la estabilidad, la fiabilidad y la rentabilidad, convirtiéndose en la piedra angular del accionamiento eléctrico en la producción industrial y las aplicaciones civiles. Este artículo analiza exhaustivamente las diferencias y relaciones entre ambos tipos de motores desde aspectos como la composición estructural, el principio de funcionamiento, las características principales, los escenarios de aplicación y los principios de selección, proporcionando una referencia para la selección en aplicaciones prácticas.
1. Posicionamiento básico y clasificación general de los motores
Un motor es un dispositivo electromagnético que convierte la energía eléctrica en energía mecánica según la ley de inducción electromagnética. Según su aplicación, se divide en motores de potencia y motores de control. Los motores de inducción pertenecen a la categoría de motores de potencia; su función principal es convertir la energía eléctrica en energía mecánica para proporcionar energía continua y estable a diversos equipos. Actualmente, los motores de inducción se utilizan ampliamente en maquinaria general, electrodomésticos y sistemas de energía. Por otro lado, los servomotores pertenecen a la categoría de motores de control. Su función principal es lograr un control preciso de la posición, la velocidad y el par mediante señales de control. Son equipos de automatización de alta gama y actuadores clave en equipos de fabricación de precisión.
Desde la perspectiva de las aplicaciones de mercado, los motores de inducción, gracias a su estructura simple y alta fiabilidad, han acaparado gradualmente más del 70 % de la cuota de mercado mundial de motores industriales y se han convertido en la fuente de energía fundamental en la producción industrial. Los servomotores están experimentando un aumento en su aplicación debido a la creciente demanda de mejoras en la automatización industrial, y su uso en máquinas herramienta de alta gama y robots industriales se está extendiendo cada vez más, convirtiéndose en un importante indicador de la capacidad de fabricación. Ambos tipos de motores tienen enfoques de aplicación diferentes, complementándose entre sí y apoyando conjuntamente las diversas necesidades de la producción industrial.
2. Diferencias estructurales entre servomotores y motores de inducción
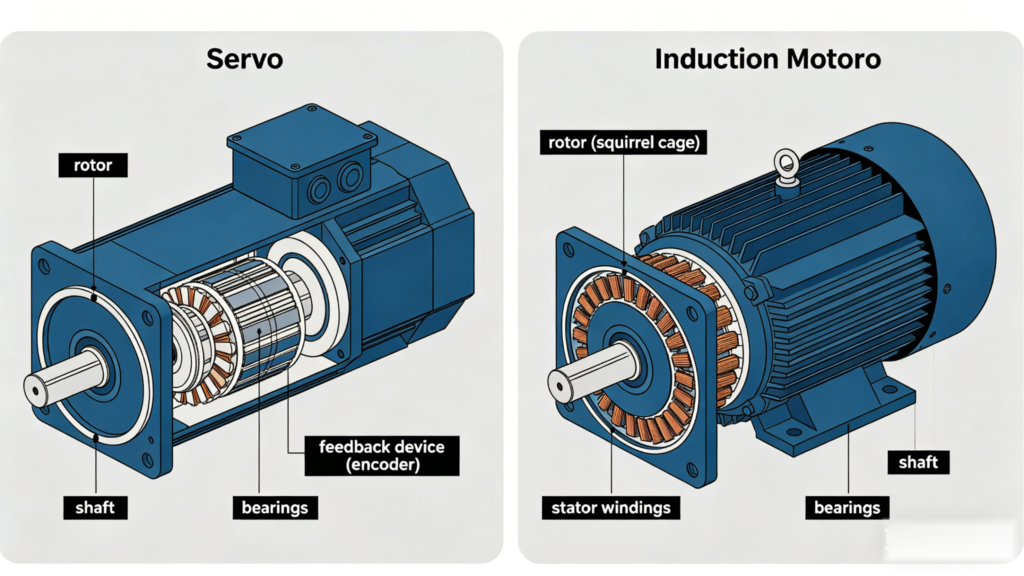
Como es bien sabido, las distintas estructuras de los motores dan lugar a diferentes rendimientos. Si bien ambos tipos de motores constan de componentes básicos como estatores, rotores, carcasas y cojinetes, el diseño, los materiales y las funciones de sus componentes principales difieren significativamente, lo cual es la razón fundamental de sus diferencias de rendimiento.
2.1 Structural Composition of Servo Motors
Un servomotor es un sistema completo de control y ejecución. Además del cuerpo del motor, puede integrar elementos de retroalimentación de alta precisión y requiere un controlador de servomotor específico para lograr un control preciso en las tres partes.
El primer componente es la carcasa del motor. El estator está compuesto por varias capas de láminas de acero al silicio aisladas, con bobinados trifásicos integrados. La aplicación de corriente alterna genera un campo magnético giratorio. El rotor suele utilizar imanes permanentes de neodimio-hierro-boro dispuestos en un número específico de pares de polos para mejorar la eficiencia y la velocidad de respuesta. La carcasa está sellada, lo que permite una óptima disipación del calor, resistencia a las vibraciones y estanqueidad, haciéndola idónea para entornos industriales complejos.
El segundo componente es el elemento de retroalimentación, que actúa como el «ojo» del motor. Recopila información sobre la posición y la velocidad del rotor en tiempo real y la envía al controlador. Los codificadores incrementales determinan la posición mediante el conteo de pulsos, pero requieren un punto de referencia; los codificadores absolutos generan directamente un código de posición único, que se conserva incluso tras un corte de energía. Los sistemas de alta precisión suelen utilizar modelos de 17 bits o superiores, logrando un posicionamiento a nivel nanométrico.
El tercer componente es el servocontrolador, que actúa como el cerebro, compuesto por una unidad de control principal DSP y un módulo de conversión de potencia. Recibe principalmente instrucciones del ordenador central y proporciona retroalimentación del codificador, utilizando un algoritmo de control de triple lazo cerrado para ajustar la tensión y la corriente de salida, garantizando así un funcionamiento preciso del motor. Además, integra funciones de protección contra sobretensión y sobrecorriente.
2.2 Composición estructural de los motores de inducción
Los motores de inducción tienen una estructura relativamente simple. No requieren elementos de retroalimentación ni controladores específicos; sus componentes principales son únicamente el estator, el rotor y la carcasa. El diseño prioriza la simplicidad y la robustez.
En primer lugar, el estator. Su estructura es similar a la del estator de un servomotor, pero el diseño del bobinado se centra más en la eficiencia de la potencia de salida. El diámetro del hilo y el número de vueltas se diseñan en función de la potencia nominal para garantizar la estabilidad operativa a largo plazo.
En segundo lugar, está el rotor, que se puede dividir en tipo jaula de ardilla y tipo rotor bobinado. El tipo jaula de ardilla es el más utilizado; consta de barras guía y anillos terminales anulares, fabricados mediante un proceso de fundición de aluminio, lo que resulta en una estructura simple y una tasa de fallos relativamente baja. En el tipo rotor bobinado, los devanados del rotor se pueden conducir a través de anillos colectores y escobillas, y se pueden conectar resistencias para mejorar el arranque y la regulación de la velocidad. Es adecuado para aplicaciones de alta potencia y arranques frecuentes.
Por último, encontramos componentes auxiliares. La carcasa está fabricada principalmente en hierro fundido, lo que proporciona una excelente disipación del calor. Se utilizan rodamientos de bolas de ranura profunda resistentes al desgaste, lo que facilita el mantenimiento. Los modelos de alta potencia pueden equiparse con ventiladores de refrigeración para garantizar la disipación del calor bajo cargas elevadas. Su estructura sencilla ofrece ventajas en cuanto a coste y fiabilidad.
2.3 Resumen de las principales diferencias estructurales
Los servomotores se basan en el control de lazo cerrado, lo que resulta en una estructura compleja y costosa. Los motores de inducción priorizan la simplicidad y la fiabilidad, sin necesidad de elementos de retroalimentación ni controladores específicos, lo que se traduce en una estructura más simple y un menor coste. Esta diferencia determina directamente las diferencias en la precisión del control y la velocidad de respuesta entre ambos.
3. Diferencias en los principios de funcionamiento entre servomotores y motores de inducción
Ambos tipos de motores funcionan según la ley de inducción electromagnética, pero sus diferentes estructuras dan lugar a diferencias fundamentales en los métodos de conversión de energía y la lógica de control: los motores de inducción logran una conversión simple de energía eléctrica en energía mecánica, sin requerir un control preciso; los servomotores, por otro lado, logran un control de movimiento preciso mediante retroalimentación de bucle cerrado.
3.1 Principio de funcionamiento de los servomotores
Los servomotores funcionan esencialmente mediante inducción electromagnética bajo control de lazo cerrado. El mecanismo principal elimina errores mediante un control de lazo cerrado triple, que consta de cuatro pasos: Primero, el controlador recibe y procesa las órdenes de control del ordenador principal; segundo, se aplica una corriente alterna específica a los devanados del estator, generando un campo magnético giratorio que impulsa la rotación del imán permanente del rotor; tercero, el codificador recopila y retroalimenta los parámetros de funcionamiento reales; cuarto, el controlador ajusta la salida en función del error, corrigiendo el estado de funcionamiento del rotor. Su respuesta de arranque/parada es del orden de los milisegundos, y su capacidad de sobrecarga puede alcanzar tres veces el par nominal, cumpliendo con los requisitos de control de alta velocidad y alta precisión.
3.2 Principio de funcionamiento de los motores de inducción
Los motores de inducción logran un accionamiento en lazo abierto basado en la «inducción electromagnética»: se aplica corriente alterna a los devanados trifásicos del estator para generar un campo magnético giratorio síncrono. Los conductores del rotor, debido a su movimiento relativo con el campo magnético, generan una corriente inducida, que luego es impulsada a girar por la fuerza electromagnética. El deslizamiento es su característica principal. Durante el funcionamiento normal, el deslizamiento oscila entre 0,01 y 0,05, lo que provoca que la velocidad fluctúe con la carga. Naturalmente, su rendimiento de regulación de velocidad es deficiente. Al combinarse con un convertidor de frecuencia, se puede lograr una regulación de velocidad continua, pero su precisión es muy inferior a la de un servomotor, y su eficiencia y factor de potencia son bajos bajo cargas ligeras.
3.3 Resumen de las principales diferencias en los principios de funcionamiento
Los servomotores son accionamientos de control de lazo cerrado, capaces de corregir errores en tiempo real; los motores de inducción son accionamientos de potencia de lazo abierto, que solo proporcionan potencia de salida. Estas diferencias en sus principios de funcionamiento determinan sus distintos escenarios de aplicación.
4. Comparación de las características principales de los servomotores y los motores de inducción
Debido a las diferencias en su estructura y principio de funcionamiento, los servomotores y los motores de inducción presentan diferencias significativas en sus características principales, que determinan directamente sus escenarios de aplicación. A continuación se presenta una comparación específica:
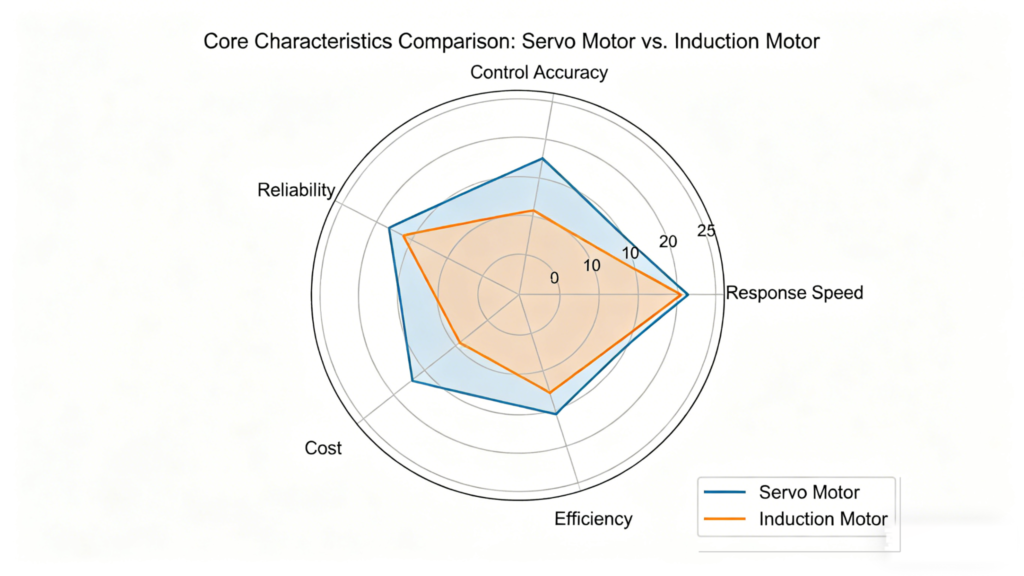
4.1 Precisión del control
Los servomotores ofrecen una precisión muy alta, determinada por la resolución del codificador. Pueden lograr un posicionamiento a nivel nanométrico y un control de velocidad preciso inferior a 0,1 r/min, gracias a un control de triple lazo cerrado que elimina errores, lo que los hace idóneos para diversos escenarios, como el ensamblaje de precisión. Los motores de inducción utilizan un control de lazo abierto, con una precisión de velocidad de tan solo ±1 % a ±5 %, e incluso con un convertidor de frecuencia, solo alcanza ±0,5 %, lo que no satisface los requisitos de alta precisión.
4.2 Velocidad de respuesta
Los servomotores tienen un tiempo de respuesta de arranque y parada de 10 a 50 milisegundos, un excelente rendimiento de aceleración y son adecuados para escenarios de arranque y parada frecuentes y de alta velocidad. Los motores de inducción necesitan superar una inercia considerable para arrancar, con un tiempo de respuesta de varios segundos a decenas de segundos, lo que los hace adecuados para escenarios de funcionamiento continuo a largo plazo que no requieren arranques y paradas frecuentes.
4.3 Eficiencia y consumo de energía
Los servomotores tienen una eficiencia de entre el 90 % y el 98 %, manteniéndose alta incluso con cargas ligeras. Su factor de potencia es cercano a 1, lo que resulta en un bajo consumo de energía. Los motores de inducción tienen una eficiencia de entre el 75 % y el 90 %, pero esta disminuye significativamente con cargas ligeras. Su factor de potencia se sitúa entre 0,7 y 0,9. Con carga nominal, la diferencia en el consumo de energía entre servomotores y motores de inducción no es significativa.
4.4 Costo y mantenimiento
Los servomotores cuestan entre 3 y 5 veces más que los motores de inducción de la misma potencia. El codificador y el controlador representan una mayor proporción del costo, lo que complica el mantenimiento y requiere una calibración periódica por parte de profesionales. Los motores de inducción cuestan solo entre un tercio y un quinto del costo, tienen una estructura simple, una baja tasa de fallas y solo requieren revisiones periódicas de lubricación y disipación de calor, lo que resulta en costos de mantenimiento extremadamente bajos.
4.5 Fiabilidad y adaptabilidad ambiental
Los servomotores tienen una estructura más compleja y sus componentes de precisión requieren condiciones ambientales extremas, siendo sensibles a altas temperaturas, polvo y vibraciones. Los motores de inducción, en cambio, poseen una estructura más robusta, carecen de piezas de precisión y se adaptan a entornos industriales adversos, lo que se traduce en una menor tasa de fallos a largo plazo.
4.6 Características de la carga
Los servomotores tienen una gran capacidad de sobrecarga, lo que los hace adecuados para situaciones con grandes fluctuaciones de carga y aceleraciones/desaceleraciones frecuentes. Los motores de inducción tienen una menor capacidad de sobrecarga, por lo que son adecuados para situaciones de carga constante sin impactos severos.
5. Escenarios de aplicación de servomotores y motores de inducción
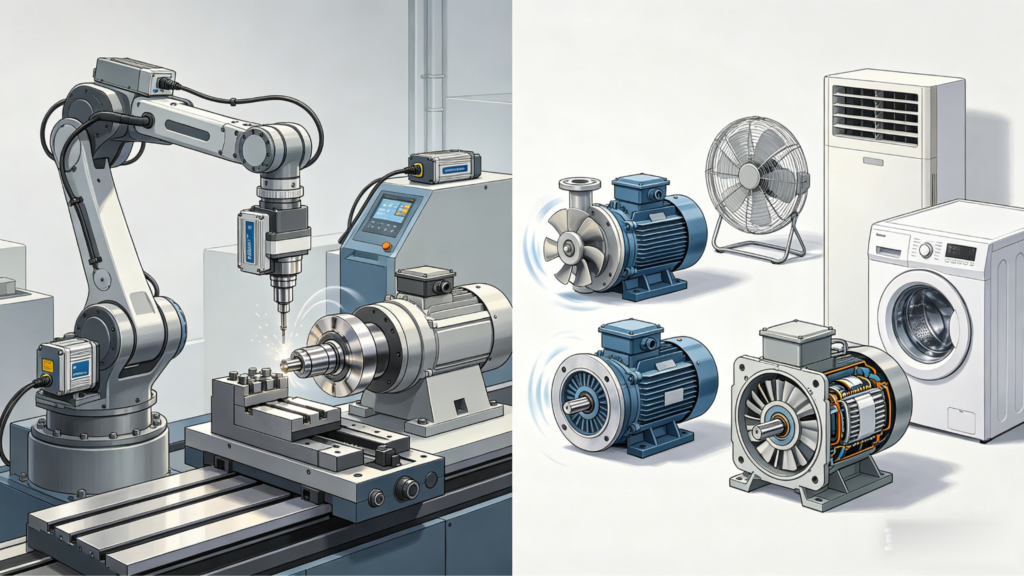
5.1 Escenarios de aplicación típicos de los servomotores
Los servomotores se caracterizan por su alta precisión, rápida respuesta y gran capacidad de sobrecarga, y se utilizan principalmente en entornos de fabricación y automatización de alta gama: robots industriales, máquinas herramienta CNC, equipos para semiconductores, equipos de fabricación electrónica y equipos para energías renovables. También se emplean en instrumentos de precisión y equipos médicos.
5.2 Escenarios de aplicación típicos de los motores de inducción
Los motores de inducción, gracias a su simplicidad, fiabilidad y alta rentabilidad, se utilizan en diversas aplicaciones de accionamiento eléctrico: equipos industriales (bombas, ventiladores, cintas transportadoras, etc., fuentes de energía básicas), electrodomésticos (lavadoras, aires acondicionados, etc., que satisfacen las necesidades energéticas diarias), sistemas de alimentación y transporte ferroviario (ventiladores de refrigeración, etc., adaptables a altas exigencias de potencia) y maquinaria agrícola (tractores, bombas de agua, etc., resistentes a entornos adversos). Además, el sistema de propulsión del Tesla Model S/X también utiliza motores de inducción, ampliando así sus aplicaciones de alta gama.
6. Principios y consideraciones para la selección de servomotores y motores de inducción
6.1 Principios básicos de selección
- Por precisión de control: seleccione un servomotor para un control preciso y un motor de inducción solo para accionamiento de potencia.
- Según las características de carga: seleccione un servomotor para grandes fluctuaciones de carga y operaciones frecuentes de arranque y parada, y un motor de inducción para cargas constantes y funcionamiento a largo plazo.
- En función del presupuesto: seleccione un servomotor si su presupuesto es suficiente y busca alta precisión, y un motor de inducción si su presupuesto es limitado y busca alta fiabilidad, teniendo en cuenta también el consumo energético a largo plazo.
- Según las condiciones ambientales: seleccione un motor de inducción para entornos hostiles y un servomotor con la protección adecuada para escenarios limpios y de alta precisión.
6.2 Consideraciones para la selección
La selección de un servomotor debe definir claramente los requisitos de control, coincidir con la precisión del codificador y el controlador, y también considerar la relación de inercia de la carga. La selección de un motor de inducción requiere determinar la potencia y el número de polos, seleccionar el inversor según las necesidades específicas, priorizar los índices de alta eficiencia como IE3/IE4 e instalarlo adecuadamente para cumplir con los requisitos del cliente.
7. Tendencias de desarrollo de la industria y perspectivas futuras
Con el impulso de la automatización industrial y las políticas de ahorro energético y protección ambiental, ambos tipos de motores se esfuerzan por evolucionar hacia una mayor precisión, eficiencia e inteligencia. Los servomotores se centran en la alta precisión, la rápida respuesta, la miniaturización, el diseño ligero y el ahorro energético inteligente. Se expanden a aplicaciones de gama alta mediante la combinación de IA y tecnología de sincronización multieje. Los motores de inducción, por otro lado, hacen hincapié en una mayor eficiencia energética, actualizaciones más inteligentes y un desarrollo especializado, lo que les permite adaptarse sin problemas a las necesidades de diferentes industrias. Mientras tanto, la aparición de productos integrados, como los servomotores y los motores de inducción, combina las ventajas de ambos, expandiéndose a escenarios de control de gama media.
8. Conclusión
Los servomotores y los motores de inducción tienen sus propias ventajas. Los servomotores ofrecen un control preciso para la fabricación de alta gama, mientras que los motores de inducción proporcionan una fuente de alimentación estable y rentable para aplicaciones generales. En la práctica, es fundamental realizar una selección basada en criterios científicos como la precisión del control, las características de la carga, el presupuesto y las condiciones ambientales. En el futuro, los servomotores y los motores de inducción seguirán optimizándose y mejorándose, proporcionando una mayor potencia para la automatización industrial y la fabricación inteligente, e impulsando la eficiencia, la precisión y la fiabilidad de los equipos.