
- Inicio
- Producto
- Motor estándar GOST
- Motor estándar IEC
 Motor monofásico serie MC con arranque por condensador
Motor monofásico serie MC con arranque por condensador- Motor monofásico serie MY/MYT con condensador permanente
- Motor monofásico serie ML con doble condensador asíncrono
- Motor trifásico serie ME2 con carcasa de aluminio de alta eficiencia (IE2)
- Motor trifásico serie ME3 con carcasa de aluminio de alta eficiencia (IE3)
- Motor trifásico serie Y2 con carcasa de hierro fundido (IE1)
- Motor trifásico serie MS con carcasa de aluminio (IE1)
- Motor trifásico serie YE2 con carcasa de hierro fundido de alta eficiencia (IE2)
- Motor trifásico serie YE3 con carcasa de hierro fundido de alta eficiencia (IE3)
- Motor para aplicaciones especiales
- Motor para puerta enrollable
- Aplicación industrial
- Noticias
- Sobre nosotros
- Contáctanos














Motores de CA frente a motores de CC sin escobillas: una comparación de principios, aplicaciones y desarrollo.
Introducción
Contenido principal: Presentar la popularidad de los motores en la producción industrial moderna y la vida cotidiana, señalar que los motores de CA y los motores de CC sin escobillas son los dos tipos de motores más utilizados, indicar el problema de que la gente suele confundirlos y aclarar que este artículo analizará las características principales, las diferencias, las aplicaciones y el desarrollo de ambos tipos de motores para ayudar a los lectores a comprenderlos intuitivamente.
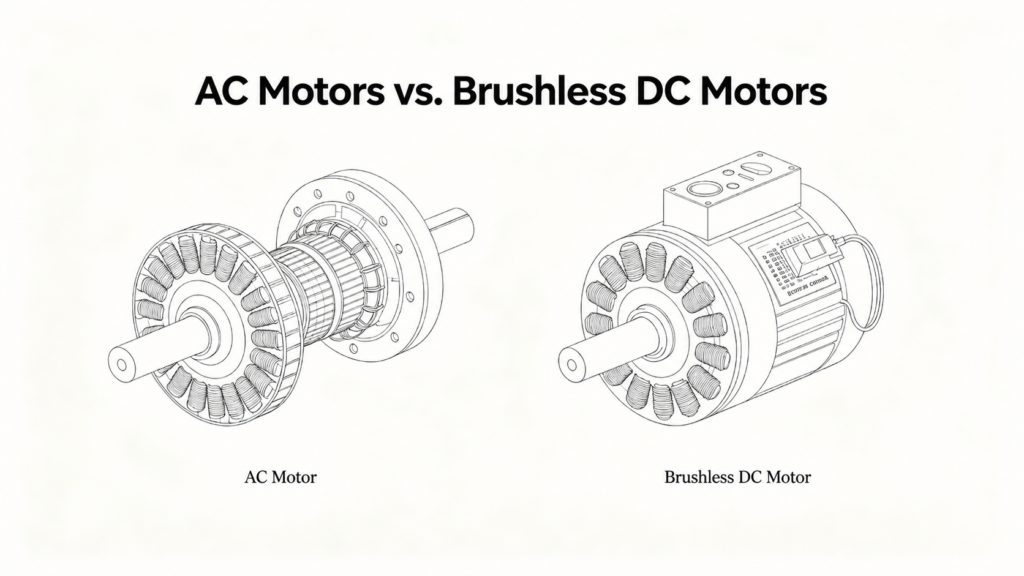
I. Definiciones básicas, estructuras principales y principios de funcionamiento de los dos tipos de motores
1.1 Motores de corriente alterna
Contenido principal: Los motores de corriente alterna (CA) se basan en la corriente alterna y realizan la conversión de energía mediante inducción electromagnética; cuentan con una larga trayectoria, tecnología madura y bajo costo. Su estructura principal consta de un estator (fijo, compuesto por un núcleo de hierro y bobinados, que genera un campo magnético giratorio al ser energizado con corriente alterna) y un rotor (ubicado en el campo magnético giratorio, que rota bajo la acción de la fuerza magnética para generar energía mecánica). Según la estructura del rotor y el principio de funcionamiento, los motores de CA se dividen en dos categorías principales: motores asíncronos y motores síncronos.
1.1.1 Motores asíncronos
Core Content: The most common type; the rotor does not require an external power supply, and relies on the rotating magnetic field of the stator to cut the rotor windings to generate induced current and electromagnetic torque. It has a simple structure (the rotor is mostly a cage-like structure welded with aluminum or copper conductors, without windings or brushes), low cost, impact resistance and high reliability, and can operate stably for a long time in harsh environments such as dust and humidity. Application scenarios include factory ventilation fans, central air conditioning water circulation pumps, household washing machines and electric fans, with a wide power adaptation range (from a few watts to hundreds of kilowatts).
1.1.2 Motores asíncronos de rotor bobinado
Contenido principal: Los devanados del rotor se pueden conectar a resistencias externas mediante anillos colectores, y la resistencia del rotor se puede ajustar para modificar el par de arranque y la regulación de velocidad. El par de arranque es entre un 30 % y un 50 % superior al de los motores de jaula de ardilla, con una regulación de velocidad flexible y un coste relativamente bajo. Es adecuado para aplicaciones que requieren arranques con cargas pesadas y ajustes frecuentes de velocidad, como grúas puente y trituradoras mineras.
1.1.3 Motores síncronos
Contenido principal: La velocidad del rotor se sincroniza con el campo magnético giratorio del estator; el rotor generalmente requiere una fuente de alimentación de excitación de CC (los motores síncronos de imanes permanentes, PMSM, no necesitan excitación externa). Los PMSM pueden ajustar automáticamente el factor de potencia, mejorar la calidad de la red eléctrica y tener una mayor eficiencia en aplicaciones de alta potencia, lo que los hace adecuados para equipos de gran escala de más de 1000 kW (como compresores de amoníaco en plantas petroquímicas y accionamientos principales de laminadores en caliente en plantas siderúrgicas). Al mismo tiempo, tienen alta eficiencia y alta densidad de potencia, y son adecuados para escenarios de alta precisión, como equipos de semiconductores y articulaciones de robots industriales.
1.2 Motores de CC sin escobillas
Contenido principal: Evolucionado a partir de motores de CC con escobillas, la mejora principal radica en la eliminación de escobillas y conmutadores, adoptando la conmutación electrónica, lo que resuelve los problemas de desgaste, ruido y corta vida útil de los motores con escobillas. En esencia, pertenece a la categoría de motores síncronos con conmutación electrónica, alimentados por corriente continua, pero que internamente la convierten en corriente alterna mediante componentes electrónicos para su funcionamiento.
1.2.1 Estructura básica
Contenido principal: Compuesto por un estator y un rotor, con una estructura más compacta. El estator es un núcleo de hierro con bobinados trifásicos (similar al estator de un motor de CA, pero con diferentes métodos de bobinado y lógica de control). El rotor está compuesto por imanes permanentes, sin bobinados ni fuente de alimentación de excitación (la diferencia fundamental con el rotor de un motor de CA). Se requiere un sensor de posición para detectar la posición del rotor y transmitir la señal al controlador. El controlador controla la secuencia de energización de los bobinados del estator a través de un inversor para realizar la conmutación electrónica y asegurar el funcionamiento estable del motor. Contenido principal: Compuesto por un estator y un rotor, con una estructura más compacta. El estator es un núcleo de hierro con bobinados trifásicos (similar al estator de un motor de CA, pero con diferentes métodos de bobinado y lógica de control). El rotor está compuesto por imanes permanentes, sin bobinados ni fuente de alimentación de excitación (la diferencia fundamental con el rotor de un motor de CA). Se requiere un sensor de posición para detectar la posición del rotor y transmitir la señal al controlador. El controlador gestiona la secuencia de energización de los devanados del estator mediante un inversor para realizar la conmutación electrónica y garantizar el funcionamiento estable del motor.
1.2.2 Principio de funcionamiento
Contenido principal: Se conecta una fuente de alimentación de CC externa al controlador. Basándose en la señal del sensor, el controlador convierte la corriente continua en corriente alterna trifásica mediante un inversor, que luego se suministra a los devanados del estator para generar un campo magnético giratorio. Los imanes permanentes del rotor giran bajo la acción de este campo magnético, y el sensor proporciona información de posición en tiempo real. El controlador ajusta continuamente la secuencia de energización para asegurar que el campo magnético esté sincronizado con el rotor, logrando así una salida de potencia continua. En comparación con los motores con escobillas, los motores de CC sin escobillas no presentan desgaste de escobillas, tienen bajo nivel de ruido, larga vida útil y mejor rendimiento y precisión en la regulación de velocidad.
1.2.3 Diferencias con los motores síncronos de imanes permanentes (PMSM)
Contenido principal: Ambos son motores de imanes permanentes y, aunque sus estructuras son similares, presentan diferencias significativas. Los motores de CC sin escobillas tienen imanes de rotor en forma de arco, densidad de flujo magnético en el entrehierro trapezoidal y corriente de estator trapezoidal. Se pueden controlar mediante sensores de efecto Hall, lo que ofrece un control sencillo y económico, pero con una ondulación de par considerable. Los motores síncronos de imanes permanentes, por otro lado, tienen polos magnéticos de rotor parabólicos, densidad de flujo magnético sinusoidal y corriente de estator sinusoidal. Requieren codificadores fotoeléctricos de precisión, que ofrecen una alta precisión de control y una baja ondulación de par, pero a un costo mayor. La selección requiere un equilibrio entre los requisitos de precisión y costo.
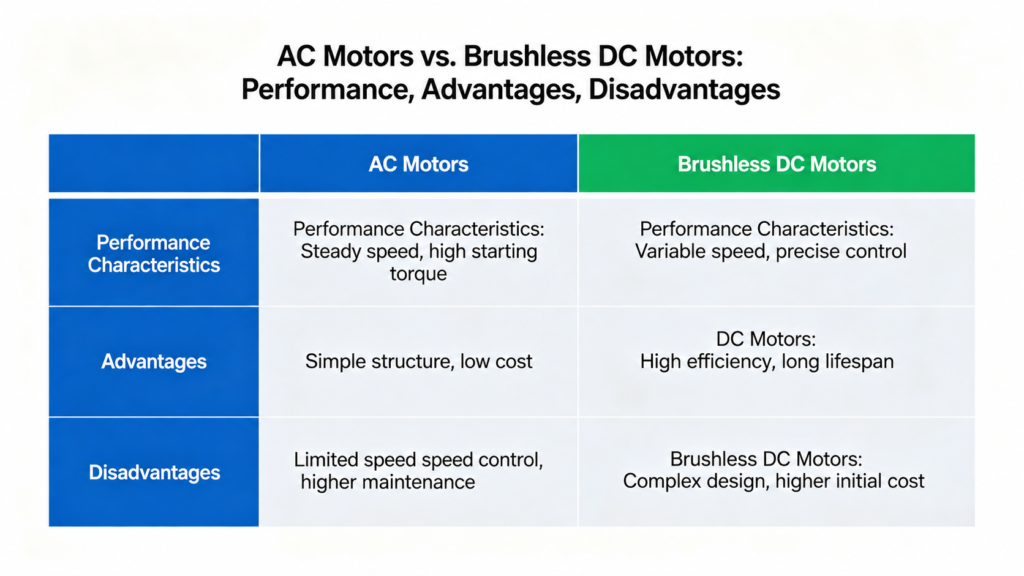
II. Comparación del rendimiento principal, ventajas y desventajas
2.1 Motores de corriente alterna
2.1.1 Ventajas
Contenido principal: Primero, su estructura simple, especialmente la de los motores asíncronos sin componentes de control electrónico complejos, resulta en una baja tasa de fallas y un mantenimiento sencillo, permitiendo un funcionamiento continuo durante años sin necesidad de mantenimiento. Segundo, su costo relativamente bajo; la tecnología madura y el proceso de fabricación simple hacen que los costos de fabricación y mantenimiento sean mucho menores que los de los motores de CC sin escobillas. Tercero, su alta adaptabilidad, cubriendo un rango de potencia desde unos pocos vatios hasta decenas de megavatios, y su capacidad para soportar entornos adversos como altas temperaturas y polvo, los convierten en un pilar de la producción industrial.
2.1.2 Desventajas
Contenido principal: Rendimiento deficiente de la regulación de velocidad; La velocidad de los motores asíncronos se ve muy afectada por la frecuencia y la carga del suministro de energía. Aunque los convertidores de frecuencia pueden mejorar esto, su precisión y velocidad de respuesta no pueden igualar las de los motores CC sin escobillas. La eficiencia disminuye y el consumo de energía es mayor en condiciones de baja velocidad y carga ligera. Baja densidad de potencia, lo que da como resultado un mayor tamaño y peso para la misma potencia de salida, lo que los hace inadecuados para aplicaciones con requisitos estrictos de tamaño y peso.
2.2 Motores de CC sin escobillas
2.2.1 Ventajas
Contenido principal: Las principales ventajas radican en el rendimiento de control y la vida útil. Amplio rango de velocidad, que permite un ajuste suave, alta precisión y respuesta rápida, satisfaciendo las necesidades de un control preciso. Alta eficiencia, que se mantiene incluso a bajas velocidades y cargas ligeras, en línea con las tendencias de ahorro de energía. Bajo nivel de ruido, funcionando de 10 a 15 dB más silencioso que los motores con escobillas debido a la ausencia de fricción de las escobillas, lo que permite un funcionamiento silencioso. Larga vida útil y costos de mantenimiento extremadamente bajos. Alta densidad de potencia, tamaño reducido y peso ligero, adecuado para equipos pequeños.
2.2.2 Desventajas
Contenido principal: Mayor costo, ya que requieren controladores y sensores, y el costo relativamente alto de los imanes permanentes es la razón principal por la que no pueden reemplazar por completo a los motores de CA. Estructura y lógica de control más complejas; una falla en el controlador puede provocar la parada del motor y las reparaciones son más difíciles. Sensibles a la temperatura y la vibración, lo que los hace inadecuados para entornos industriales adversos.
III. Escenarios de aplicación práctica
3.1 Motores de corriente alterna
Contenido principal: Debido a su simplicidad, bajo costo y confiabilidad, se utilizan principalmente en escenarios donde no se requiere alta precisión de control de velocidad y se necesita un funcionamiento estable a largo plazo. En el sector industrial, los motores asíncronos se utilizan ampliamente en ventiladores, bombas, cintas transportadoras y otras aplicaciones. Los motores de rotor bobinado se utilizan para equipos de arranque de servicio pesado, mientras que los motores síncronos se utilizan en equipos grandes y de alta potencia. En la vida cotidiana, los electrodomésticos de gama media y baja, como lavadoras, ventiladores eléctricos y compresores de aire acondicionado, así como infraestructuras como el suministro de agua urbana y el riego agrícola, dependen de motores de CA para su funcionamiento.
3.2 Motores de CC sin escobillas
Contenido principal: Se utilizan en aplicaciones con estrictos requisitos de precisión en el control de velocidad, eficiencia, ruido y tamaño, y su rango de aplicación se expande constantemente. En la automatización industrial, se utilizan para generar motores de rodillos en líneas de producción automatizadas y accionar robots de clasificación, asegurando un control preciso. En robótica, se utilizan en las articulaciones de robots colaborativos y en las ruedas motrices de robots móviles AGV, asegurando un movimiento flexible debido a su alta densidad de par y respuesta rápida. En la vida cotidiana, los electrodomésticos de alta gama los utilizan para accionar ventiladores, logrando niveles de ruido tan bajos como 22 dB y ahorro de energía. Dispositivos pequeños como drones, cepillos de dientes eléctricos y afeitadoras también se benefician de su pequeño tamaño y larga vida útil, lo que permite un funcionamiento estable. En el campo médico, equipos como escáneres CT y respiradores dependen de bajo ruido y alta precisión. En el sector de vehículos de nueva energía, el sistema de propulsión del Tesla Model 3 utiliza un motor de CC sin escobillas con una eficiencia del 97 % y una tasa de recuperación de energía de frenado del 23 %. La dirección asistida eléctrica y los compresores de aire acondicionado también utilizan este tipo de motor.
IV. Tendencias de desarrollo de los dos tipos de motores
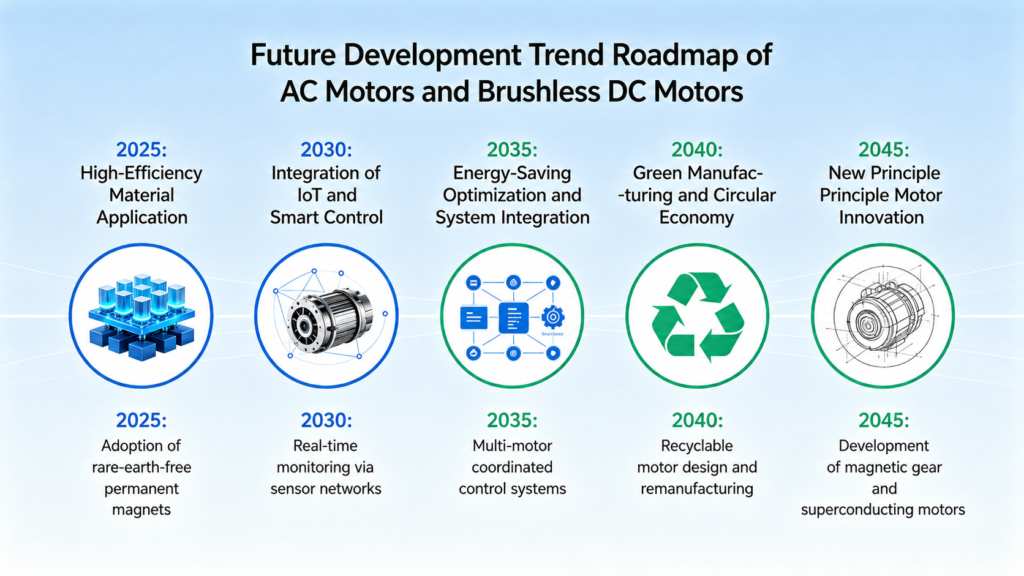
Contenido principal: Gracias a los avances tecnológicos, ambos tipos de motores están evolucionando hacia una mayor eficiencia, ahorro energético e inteligencia. Los motores de CA mejoran su eficiencia mediante una estructura optimizada y el uso de materiales de alta eficiencia, y optimizan el control de velocidad mediante tecnología de control de velocidad de frecuencia variable. También están evolucionando hacia tamaños más grandes y mayor inteligencia, lo que permite la monitorización remota y las alertas de fallos. Por otro lado, los motores de CC sin escobillas reducen los costes mediante avances en materiales de imanes permanentes y componentes electrónicos, optimizan los algoritmos de control para reducir la pulsación del par y se están desarrollando hacia la miniaturización y la integración, combinando el motor, el controlador y los sensores en una sola unidad, ampliando así su rango de aplicaciones.
V. Desarrollo futuro y sugerencias de selección
5.1 Desarrollo futuro
Contenido principal: Mucha gente se pregunta cuál de estos dos tipos de motores reemplazará al otro en el futuro. En realidad, son complementarios y simbióticos, cada uno desempeñando un papel importante en sus áreas de especialización. Los motores de CA seguirán predominando en la producción industrial, la infraestructura y los electrodomésticos de gama baja a media; los motores de CC sin escobillas aumentarán aún más su popularidad en electrodomésticos de alta gama, automatización industrial y vehículos de nueva energía. Con los avances tecnológicos, la diferencia entre los motores de CA y los de CC sin escobillas seguirá reduciéndose, y es posible que en el futuro surjan nuevos tipos de motores que combinen las ventajas de ambos, satisfaciendo así las necesidades de aplicaciones más diversas.
5.2 Sugerencias de selección
Contenido principal: En la selección práctica, debemos considerar el escenario, los requisitos y el costo. Para equipos industriales de gran tamaño con presupuestos limitados y requisitos de precisión de control de baja velocidad, debemos priorizar los motores de CA. Para electrodomésticos de alta gama, equipos de precisión y vehículos de nueva energía, donde la precisión, la eficiencia y el tamaño son cruciales y los presupuestos son amplios, debemos priorizar los motores de CC sin escobillas. Al mismo tiempo, debemos considerar los costos de mantenimiento y la adaptabilidad del motor a los cambios ambientales; los motores de CA son preferibles para entornos adversos, mientras que los motores de CC sin escobillas son preferibles para aplicaciones de control de precisión.
Conclusión
Contenido principal: En resumen, tanto los motores de CA como los de CC sin escobillas son dispositivos de potencia vitales en la sociedad moderna. Los motores de CA son tecnológicamente avanzados, fiables y duraderos, y constituyen la base de la producción industrial; mientras que los motores de CC sin escobillas son altamente eficientes, inteligentes, compactos y silenciosos, y lideran el desarrollo de equipos de alta gama. Con el progreso tecnológico, ambos seguirán evolucionando, aportando mayor comodidad a la producción y a la vida cotidiana, e impulsando a la sociedad hacia la eficiencia, el ahorro energético y la inteligencia. Su desarrollo es inseparable de la innovación tecnológica y de la demanda, transformando constantemente nuestras vidas e impulsando el progreso de la civilización industrial.