















Se avete mai lavorato con i motori, in particolare con i motori asincroni trifase comunemente utilizzati nella produzione industriale, avrete sicuramente sentito parlare di “slittamento”. Molti si avvicinano a questo termine per la prima volta e potrebbero avere diverse idee sbagliate: cos’è lo slittamento? È una rotazione imprecisa del motore? O è una perdita? È un difetto di progettazione? Alcuni credono erroneamente che minore sia lo slittamento, meglio è, idealmente pari a zero, affinché un motore sia considerato perfetto.
In realtà, queste idee sono errate. Lo slittamento non è un difetto del motore; al contrario, è l’elemento chiave per il normale funzionamento di un motore asincrono e per la sua capacità di azionare un carico. Senza slittamento, un motore asincrono non può ruotare. In questo articolo, analizzeremo le teorie e i principi fondamentali dello slittamento, spiegando chiaramente tutte le conoscenze e l’esperienza pertinenti. Integreremo inoltre queste informazioni con la nostra esperienza di progettazione con Dayou Motors per approfondire la comprensione della teoria e la sua applicazione pratica.
1.0 Innanzitutto, bisogna capire: perché un motore asincrono si chiama “asincrono”?
1.1 Che cos’è un motore asincrono?
Before understanding slip, we should first understand the meaning of asynchronous. Asynchronous motors are the most widely used and prevalent type of motor worldwide. They are used in over 90% of factory fans, pumps, machine tools, and everyday appliances like air conditioners and washing machines. Their core advantages are reliability, simple structure, and ease of maintenance.
1.2 Principio di funzionamento fondamentale del motore asincrono
Il principio di funzionamento fondamentale di un motore asincrono è l’induzione elettromagnetica. Esso è costituito principalmente da uno statore e un rotore, e la sua logica di funzionamento si articola in quattro fasi.
1.2.1 Lo statore genera un campo magnetico rotante
Innanzitutto, lo statore viene alimentato con corrente alternata, generando un campo magnetico rotante. Questo campo magnetico ruota a una velocità fissa, nota come “velocità di rotazione sincrona”, determinata dalla frequenza di alimentazione e dal numero di poli.
1.2.2 Il campo magnetico rotante taglia i conduttori del rotore
In secondo luogo, il campo magnetico rotante taglia continuamente i conduttori del rotore per generare una coppia elettromagnetica. Tuttavia, questo taglio richiede un movimento relativo e deve esserci una differenza di velocità tra il campo magnetico e il rotore.
1.2.3 Processo di conversione energetica
In terzo luogo, dopo il taglio, si completa il processo di induzione di corrente nei conduttori e di conversione dell’energia elettrica in energia del rotore.
1.2.4 Il rotore genera coppia e ruota
Infine, il rotore subisce una forza dopo aver indotto corrente nel campo magnetico, generando una coppia elettromagnetica che aziona la rotazione del rotore e del carico. È importante comprendere che la velocità sincrona del campo magnetico rotante è sempre superiore alla velocità effettiva del rotore; le due velocità non sono sincronizzate, ed è da qui che deriva il termine “motore asincrono”. Questa asincronia non è un difetto, ma una condizione necessaria per il funzionamento del motore. Senza movimento relativo, non vi è campo magnetico in movimento e, di conseguenza, non c’è potenza.
1.3 Definizione di slittamento e rapporto di slittamento
La differenza di velocità tra il campo magnetico e il rotore è chiamata “slittamento”; il rapporto tra lo slittamento e la velocità sincrona è chiamato “rapporto di slittamento”. In parole semplici, la formula è: Rapporto di slittamento = (Velocità sincrona – Velocità effettiva del rotore) ÷ Velocità sincrona. In sostanza, rappresenta il grado di ritardo del rotore rispetto al campo magnetico, misurando l’entità del movimento relativo.
1.4 Analogia per comprendere lo slittamento
Ad esempio, immaginiamo due persone che corrono. La persona davanti corre a velocità costante, mentre quella dietro non riesce mai a raggiungerla. La differenza di distanza tra loro è lo “slittamento”, e il rapporto tra questa differenza di distanza e la velocità della persona davanti è il “rapporto di slittamento”. Se le loro velocità fossero uguali, la persona davanti non fornirebbe alcuna spinta e quella dietro si fermerebbe. Questo è perfettamente coerente con la logica di un motore asincrono.
2.0 Teoria fondamentale: qual è l’essenza del rapporto di slittamento?
Il fulcro del rapporto di slittamento non è il calcolo della formula, bensì il suo ruolo fondamentale. In breve, lo slittamento rappresenta il collegamento tra l’energia elettrica e quella meccanica in un motore asincrono. In altre parole, lo slittamento è un indicatore dell’intensità dell’induzione elettromagnetica. Maggiore è lo slittamento del motore, più velocemente il campo magnetico attraversa il rotore, maggiore è la corrente indotta nel rotore e maggiore è la coppia erogata dal motore; al contrario, minore è lo slittamento, minore è l’efficienza del motore.
3.0 Teoria chiave: Senza slittamento, un motore asincrono non gira!
3.1 Fraintendimenti comuni sullo scivolamento
Questo è il punto più facilmente frainteso: lo slittamento non è un difetto, non è un errore; è l'”anima” del motore asincrono, la ragione fondamentale per cui il motore ruota e aziona il carico. Molti pensano che minore sia lo slittamento, meglio è, addirittura desiderando che sia pari a 0, il che è un errore madornale. Quando lo slittamento è pari a 0, il motore si arresta immediatamente e non può funzionare affatto.
3.2 Analogia per comprendere la necessità dello slittamento
Questo concetto può essere paragonato alla corsa. Solo quando chi è davanti è più veloce di chi è dietro può dare una spinta a quest’ultimo; se le velocità sono uguali, non c’è spinta e chi è dietro si ferma. Lo stesso principio si applica ai motori asincroni. Il rotore può ruotare; la sua funzione principale è la corrente e la coppia indotte generate dal campo magnetico che lo attraversa. Il prerequisito per questo attraversamento è il movimento relativo, la cui entità è determinata dal tasso di slittamento.
3.3 Esempio pratico della funzione di scorrimento
Per fare un esempio pratico, il motore di un ventilatore è un motore asincrono. In condizioni di normale funzionamento, il suo tasso di slittamento è compreso tra l’1% e il 3%, garantendo un movimento relativo stabile. Se le pale del ventilatore vengono forzatamente bloccate, il tasso di slittamento raggiunge il 100%, causando un brusco aumento della corrente. Il motore tenterà di azionare le pale, ma mantenerlo bloccato per un periodo prolungato potrebbe bruciarlo. Questa è la funzione principale del tasso di slittamento. Senza di esso, il motore non avrebbe potenza. Pertanto, i motori asincroni devono avere un tasso di slittamento durante il funzionamento; è un prerequisito per l’induzione elettromagnetica e la fonte fondamentale per la generazione di coppia. Questo non è un difetto, ma una condizione necessaria per il normale funzionamento del motore.
4.0 La teoria della velocità sincrona: perché è fissa? Qual è la sua relazione con il tasso di slittamento?
4.1 Definizione e caratteristiche della velocità sincrona
La velocità sincrona è la velocità di rotazione del campo magnetico rotante. È costante ed è anche la base per il calcolo del tasso di scorrimento e la chiave per comprendere le variazioni del tasso di scorrimento. Il suo valore è determinato da soli due fattori ed è indipendente dal carico e dalla temperatura:
4.1.1 Frequenza di alimentazione (f)
50 Hz (50 volte al secondo) in Cina. Maggiore è la frequenza, più velocemente ruota il campo magnetico e maggiore è la velocità sincrona.
4.1.2 Numero di poli
Specifica il numero di coppie di poli nell’avvolgimento secondario. 2 poli = 1 coppia, 4 poli = 2 coppie. Maggiore è il numero di poli, minore è la velocità sincrona. Questa informazione sarà chiaramente indicata sulla targhetta del motore.
4.2 Formula della velocità sincrona ed esempi comuni
Formula della velocità sincrona (spiegazione semplificata): Velocità sincrona = (60 × frequenza di alimentazione) ÷ numero di coppie di poli. Il “60” converte la frequenza al secondo in velocità al minuto. La logica di base rimane che “la frequenza e il numero di poli determinano la velocità”. Esempi comuni (alimentatore cinese a 50 Hz):
– 2-pole motor: Synchronous speed 3000 rpm, normal full-load slip 1%~3%, used in high-speed equipment;
– Motore a 4 poli: velocità sincrona 1500 giri/min, slittamento a pieno carico normale 3%~5%, il motore più comunemente utilizzato nella produzione industriale;
– Motore a 6 poli: velocità sincrona 1000 giri/min, slittamento normale a pieno carico 3%~5%, utilizzato in apparecchiature a media e bassa velocità.
4.3 Relazione tra velocità sincrona e slittamento
>Collegamento fondamentale: la velocità sincrona è fissa, lo slittamento varia dinamicamente. Il fulcro di questa variazione è la velocità del rotore, che è determinata dal carico. Ad esempio, un motore a 4 poli ha una velocità sincrona costante di 1500 giri/min. In condizioni di assenza di carico, la velocità del rotore è prossima a 1500 giri/min (slittamento estremamente ridotto), a pieno carico è prossima a 1440 giri/min (slittamento intorno al 4%) e in condizioni di sovraccarico è inferiore a 1440 giri/min (slittamento < 1 > 5%).
5.0 Schema di variazione del tasso di slittamento: direttamente correlato al carico, regolabile automaticamente
5.1 Regola base della variazione del tasso di scorrimento
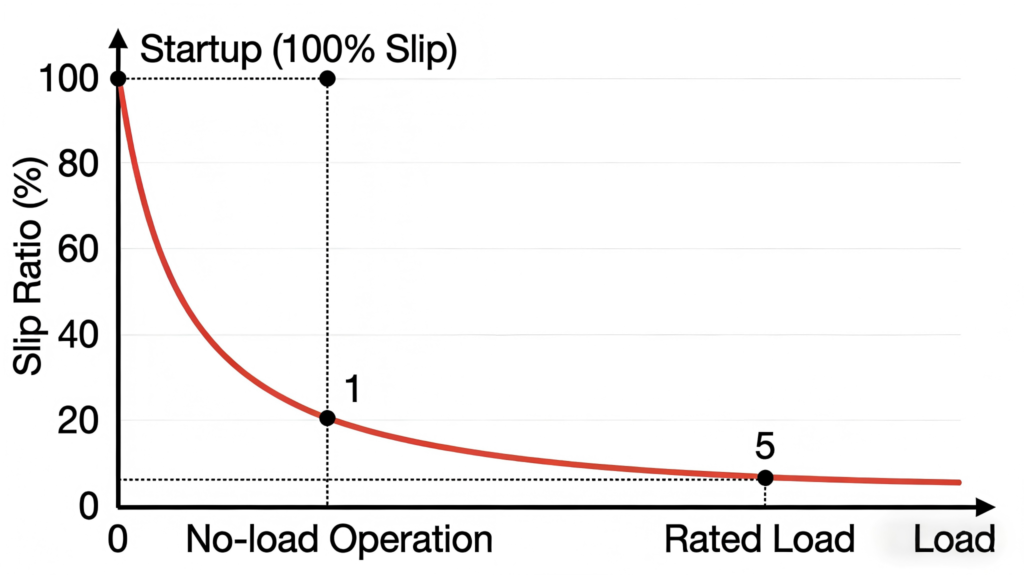
Il tasso di slittamento non è un valore fisso; il suo principale fattore determinante è il carico, e può autoregolarsi. Minore è il carico, minore è il tasso di slittamento; maggiore è il carico, maggiore è il tasso di slittamento. La regolazione non richiede interventi manuali, il che rappresenta un vantaggio fondamentale dei motori asincroni, supportato dalla logica teorica del “carico adattivo a coppia elettromagnetica”. Le variazioni del tasso di slittamento possono essere classificate in quattro condizioni operative comuni, che analizzeremo e comprenderemo attraverso la teoria e semplici scenari:
5.1.1 Avvio istantaneo: tasso di slittamento pari al 100%
Quando la velocità del rotore è 0, il tasso di slittamento = (velocità sincrona – 0) ÷ velocità sincrona = 1, che rappresenta il tasso di slittamento massimo. In questo momento, il moto relativo è al suo massimo, la corrente di avviamento è 5-8 volte la corrente nominale e viene generata la coppia di avviamento massima per vincere l’inerzia del rotore. Nelle fabbriche si utilizza l’avviamento stella-triangolo per avviare motori di grandi dimensioni al fine di ridurre la corrente di avviamento e proteggere le apparecchiature; questo si basa sulla teoria dell’avviamento del tasso di slittamento.
5.1.2 Funzionamento a vuoto: il tasso di slittamento è compreso tra lo 0,3% e l’1%.
In assenza di carico, il rotore deve vincere solo il proprio attrito e la resistenza dell’aria. La coppia richiesta è relativamente bassa e la velocità è prossima alla velocità sincrona, con conseguente slittamento molto ridotto. Pertanto, anche la corrente a vuoto è bassa e la generazione di calore è minima. Durante l’ispezione di un motore, avviarlo a vuoto e osservare velocità, rumore e temperatura consente di valutare le condizioni di base del motore. Questa è un’applicazione pratica della teoria dello slittamento.
5.1.3 Carico nominale: il tasso di slittamento è compreso tra l’1% e il 5%
Quando il motore funziona a carico nominale, la velocità del rotore è stabile e lo slittamento rientra nell’intervallo ottimale. L’induzione elettromagnetica è moderata, l’efficienza è massima e l’aumento di temperatura è ragionevole. Ad esempio, il motore asincrono ad alta efficienza Dayou serie YE3 (classe IE3), a 4 poli e 50 Hz, ha uno slittamento nominale stabile intorno al 4% e un’efficienza superiore al 90%, risultando adatto per un funzionamento industriale continuo a lungo termine. È progettato sulla base della teoria del funzionamento ottimale dello slittamento.
>5.1.4 Funzionamento in sovraccarico: slittamento < 1 > 5%
Quando il carico supera il valore nominale, il rotore viene trascinato, causando una diminuzione della velocità e un aumento dello slittamento. Ciò comporta un picco di corrente indotta, maggiori perdite nel motore e un grave surriscaldamento. Un sovraccarico prolungato può potenzialmente bruciare gli avvolgimenti. Se si nota una diminuzione della velocità del motore, un surriscaldamento dell’involucro e una corrente eccessiva, è molto probabile che la causa sia un sovraccarico. In questo caso, verificare il carico o la presenza di blocchi meccanici per individuare e risolvere tempestivamente il problema.
6.0 Il ruolo fondamentale dello slittamento: nella progettazione, nell’utilizzo e nella manutenzione del motore
6.1 Panoramica del ruolo principale dello slittamento
Il ruolo dello slittamento è cruciale durante l’intero ciclo di vita di un motore. Ciascun ruolo è supportato teoricamente ed è strettamente correlato al funzionamento pratico. Si possono riassumere quattro ruoli principali:
6.1.1 L’unico prerequisito per la generazione di coppia
Catena logica principale: Slittamento → Movimento relativo → Rotore di taglio del campo magnetico → Corrente indotta → Coppia elettromagnetica → Rotazione del motore. Lo slittamento è il punto di partenza di questa catena logica. Senza slittamento non c’è coppia e il motore non può funzionare. Ad esempio, il motore di una lavatrice ha uno slittamento del 100% all’avvio, generando la coppia di avviamento per azionare il cestello interno. Durante il funzionamento, lo slittamento è compreso tra l’1% e il 3%, garantendo un funzionamento stabile.
6.1.2 Adattamento automatico alle variazioni di carico
I motori asincroni non richiedono un controllore esterno e possono regolare automaticamente lo slittamento in base al carico: all’aumentare del carico, la velocità del rotore diminuisce, lo slittamento aumenta e la coppia aumenta fino al raggiungimento dell’equilibrio; al diminuire del carico, la velocità del rotore aumenta, lo slittamento diminuisce e la coppia diminuisce, fino al raggiungimento di nuovo dell’equilibrio. Ad esempio, in un ventilatore da officina, quando porte e finestre sono aperte (carico maggiore), lo slittamento aumenta automaticamente per garantire un flusso d’aria stabile; quando porte e finestre sono chiuse (carico ridotto), lo slittamento diminuisce, con conseguente risparmio energetico.
6.1.3 Determinazione delle prestazioni di avviamento del motore
All’avvio, lo slittamento è pari al 100%. La coppia di avviamento e la corrente di avviamento sono strettamente correlate alla progettazione dello slittamento. I progettisti ottimizzano la struttura del rotore per garantire caratteristiche di avviamento fluide. Dayou Motors personalizza inoltre i suoi prodotti per diversi scenari, in modo da garantire che le prestazioni di avviamento siano adattate alle condizioni operative.
6.1.4 “Indicatori di controllo dello stato di salute” per la valutazione delle condizioni del motore
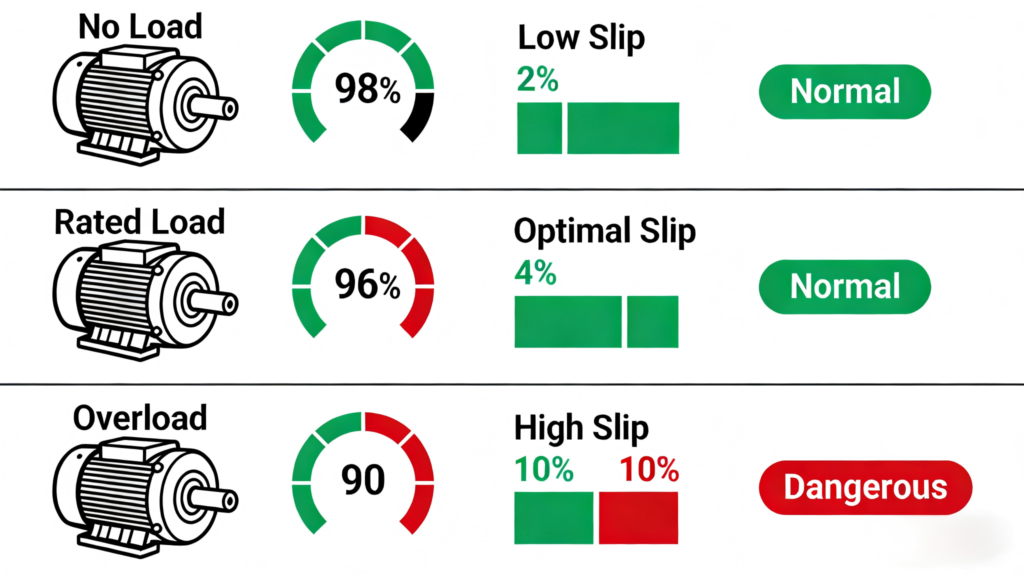
Possiamo determinare rapidamente le condizioni del motore in base all’andamento delle variazioni di slittamento:
Quando lo slittamento a pieno carico è compreso tra l’1% e il 5%, il motore può funzionare normalmente.
<Quando lo slittamento a vuoto è < 1 >1%, il motore può funzionare normalmente, ma un funzionamento prolungato a vuoto può comportare uno spreco di energia.
Quando lo slittamento a pieno carico è < 1 >5%, il motore è sovraccarico e richiede una risoluzione dei problemi.>
Quando lo slittamento aumenta improvvisamente e bruscamente, il motore potrebbe non funzionare correttamente.
Quando lo slittamento si avvicina al 100%, il momento dell’avviamento può causare il bloccaggio del motore e la bruciatura degli avvolgimenti.
7.0 Relazione tra slittamento e coppia: il “biglietto da visita” fondamentale delle prestazioni del motore
7.1 Panoramica della curva coppia-slittamento (curva s-T)
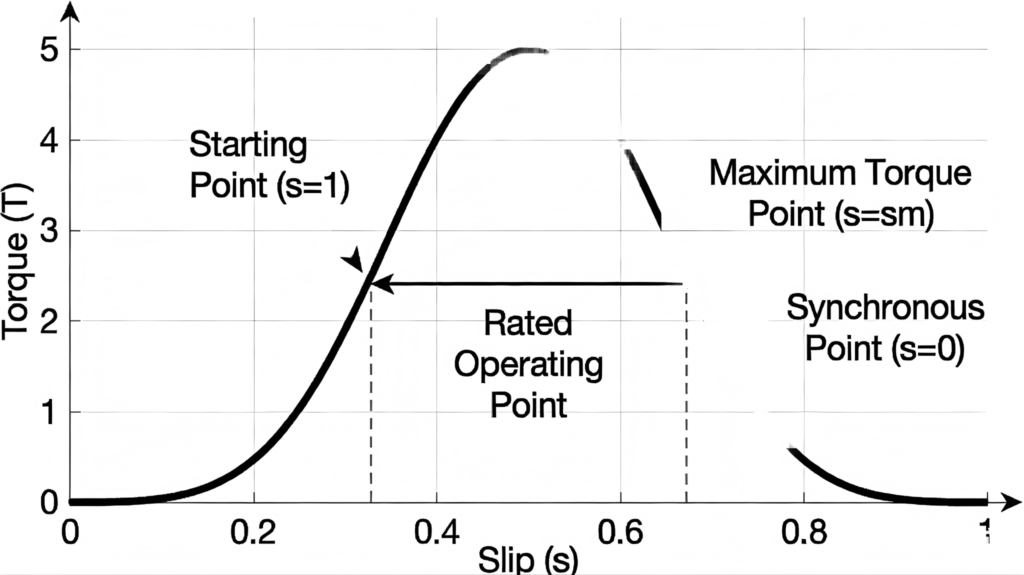
Ogni motore asincrono possiede una “curva coppia-scorrimento” (curva s-T), che rappresenta il fulcro delle prestazioni del motore, determinando le prestazioni di avviamento, la coppia massima e l’intervallo di stabilità. La logica teorica dei nodi chiave è la seguente:
7.1.1 Punto di partenza (s=1): corrispondente alla coppia di avviamento
Al momento dell’avviamento, lo slittamento è del 100%. La coppia di avviamento determina se il motore può avviarsi: per l’avviamento a basso carico (ventilatori, pompe dell’acqua), la coppia di avviamento è pari a 1,0-1,5 volte la coppia nominale; per l’avviamento a carico pesante (frantumatori), deve essere pari a 2,0-3,0 volte o più per garantire il superamento dell’inerzia.
7.1.2 Punto di coppia massima (s=sm, slittamento critico): corrispondente alla coppia massima
Il punto più alto della curva rappresenta la coppia massima, ovvero la forza massima che il motore può erogare. Questo valore determina la sua capacità di sovraccarico. Se il carico supera la coppia massima, il motore si arresta. Dayou Motors ottimizza la curva per cercare di migliorare la coppia massima, aumentare la capacità di sovraccarico e garantire un funzionamento stabile anche in presenza di fluttuazioni di carico.
7.1.3 Punto di funzionamento nominale (s = slittamento nominale): corrisponde alla coppia nominale
Uno slittamento compreso tra l’1% e il 5% corrisponde alla coppia nominale. Questo è il punto in cui il motore raggiunge la massima efficienza e un aumento di temperatura accettabile, ed è anche il punto di funzionamento ottimale. Nella scelta di un motore, è opportuno optare per un modello con una coppia nominale maggiore o uguale alla coppia di carico per garantire un funzionamento corretto.
7.1.4 Punto di sincronizzazione (s = 0): Corrisponde a Coppia = 0
Il rotore e il campo magnetico ruotano alla stessa velocità. Senza coppia, il motore si arresta, il che dimostra ancora una volta che un motore con un coefficiente di slittamento pari a 0 non può funzionare. I progettisti definiscono la curva di slittamento in base alle diverse esigenze. Ventilatori e pompe idrauliche richiedono curve più dolci, mentre i frantumatori necessitano di curve più ripide. Ogni prodotto di Dayou Motor può essere adattato allo scenario specifico per ottimizzare il coefficiente di slittamento.
8.0 Caso pratico: Determinazione rapida dello stato motorio mediante la teoria
8.1 Panoramica del caso
Supponiamo che una fabbrica disponga di un motore asincrono a 4 poli e 50 Hz con una targhetta che indica una velocità nominale di 1440 giri/min, una velocità a vuoto di 1490 giri/min e una velocità a pieno carico di 1400 giri/min. Possiamo utilizzare la teoria per determinarne lo stato:
8.1.1 Calcolo della velocità sincrona
Motore a 4 poli (2 coppie di poli), velocità sincrona 1500 giri/min (fissa);
8.1.2 Giudizio sullo stato di valutazione
1440 giri/minuto vicino a 1500 giri/minuto, slittamento tra l’1% e il 5%, normale;
8.1.3 Valutazione dello stato a vuoto
1490 giri/minuto vicino a 1500 giri/minuto, tasso di slittamento dallo 0,3% all’1%, normale;
8.1.4 Valutazione dello stato di sovraccarico
1400 giri/minuto si discosta significativamente da 1500 giri/minuto, tasso di slittamento < 1 > 5%, pericoloso, richiede arresto e ispezione.>
8.2 Conclusione del caso
Pertanto, come possiamo vedere, una volta compresa la teoria del tasso di slittamento, possiamo determinare rapidamente lo stato del motore senza calcoli complessi.