















Если вы когда-либо работали с электродвигателями, особенно с трехфазными асинхронными двигателями, широко используемыми в промышленном производстве, вы, несомненно, слышали о «скольжении». Многие люди впервые сталкиваются с этим термином и могут иметь различные заблуждения: что такое скольжение? Это неточное вращение двигателя? Или это потеря? Это конструктивный недостаток? Некоторые ошибочно полагают, что чем меньше скольжение, тем лучше, в идеале — нулевое, чтобы двигатель считался идеальным.
На самом деле, эти представления неверны. Скольжение — это не дефект двигателя; напротив, это ключевой фактор нормальной работы асинхронного двигателя и его способности приводить в движение нагрузку. Без скольжения асинхронный двигатель не может вращаться. В этой статье мы обсудим основные теории и принципы скольжения, четко объяснив все соответствующие знания и опыт. Мы также объединим это с нашим опытом проектирования двигателей Dayou, чтобы улучшить наше понимание теории и ее практического применения.
1.0 Прежде всего, разберемся: почему асинхронный двигатель называется «асинхронным»?
1.1 Что такое асинхронный двигатель?
Прежде чем понять, что такое скольжение, следует сначала разобраться в значении асинхронного двигателя. Асинхронные двигатели — наиболее распространенный и широко используемый тип двигателей в мире. Они применяются более чем в 90% заводских вентиляторов, насосов, станков и бытовой техники, такой как кондиционеры и стиральные машины. Их основные преимущества — надежность, простая конструкция и легкость обслуживания.
1.2 Основной принцип работы асинхронного двигателя
Основной принцип работы асинхронного двигателя — «электромагнитная индукция». Он состоит в основном из статора и ротора, а его логика работы включает четыре этапа.
1.2.1 Статор генерирует вращающееся магнитное поле
Сначала статор запитывается переменным током, создавая вращающееся магнитное поле. Это магнитное поле вращается с постоянной скоростью, известной как «синхронная скорость вращения», которая определяется частотой источника питания и количеством полюсов.
1.2.2 The rotating magnetic field cuts the rotor conductors
Second, the rotating magnetic field continuously cuts the rotor conductors to generate electromagnetic torque. However, this cutting requires relative motion, and there must be a difference in speed between the magnetic field and the rotor.
1.2.3 Процесс преобразования энергии
В-третьих, завершается процесс индуцирования тока в проводниках после их обрыва и преобразования электрической энергии в энергию ротора.
1.2.4 Ротор создает крутящий момент и вращается.
Наконец, после индукции тока в магнитном поле ротор испытывает силу, генерирующую электромагнитный момент, приводящий в движение вращение ротора и нагрузки. Следует понимать, что синхронная скорость вращения магнитного поля всегда выше фактической скорости ротора; эти две скорости не синхронизированы, отсюда и название «асинхронный двигатель». Эта асинхронность не является недостатком, а необходимым условием работы двигателя. Без относительного движения отсутствует перекрытие магнитного поля, а следовательно, и мощность.
1.3 Определение скольжения и коэффициента скольжения
Разница в скорости между магнитным полем и ротором называется «скольжением»; отношение скольжения к синхронной скорости называется «коэффициентом скольжения». Проще говоря, формула выглядит так: Коэффициент скольжения = (Синхронная скорость — Фактическая скорость ротора) ÷ Синхронная скорость. По сути, он показывает, насколько ротор «отстает» от магнитного поля, измеряя величину относительного движения.
1.4 Аналогия для понимания скольжения
Например, представьте себе двух бегущих людей. Человек впереди бежит с постоянной скоростью, а человек позади никогда не сможет его догнать. Разница в расстоянии между ними — это «проскальзывание», а отношение этой разницы в расстоянии к скорости человека впереди — это «коэффициент проскальзывания». Если бы их скорости были одинаковыми, человек впереди не создавал бы никакой тяги, а человек позади остановился бы. Это полностью соответствует логике асинхронного двигателя.
2.0 Основная теория: В чем суть коэффициента скольжения?
Суть коэффициента скольжения заключается не в вычислении формулы, а в мосте. Короче говоря, скольжение — это мост для преобразования энергии в асинхронном двигателе, соединяющий электрическую и механическую энергию. Проще говоря, скольжение — это показатель интенсивности электромагнитной индукции. Чем больше скольжение двигателя, тем быстрее магнитное поле пересекает ротор, тем больше индуцированный ток в роторе и тем больше выходной крутящий момент двигателя; и наоборот, чем меньше скольжение, тем менее эффективен двигатель.
3.0 Ключевая теория: Без проскальзывания асинхронный двигатель не будет вращаться!
3.1 Распространенное заблуждение относительно скольжения
Это самый легко неправильно понимаемый момент: проскальзывание — это не неисправность, не ошибка; это «душа» асинхронного двигателя, фундаментальная причина, по которой двигатель вращается и приводит в движение нагрузку. Многие считают, что чем меньше проскальзывание, тем лучше, даже желая, чтобы оно было равно нулю, что означает ставить телегу впереди лошади. Когда проскальзывание равно нулю, двигатель немедленно остановится и вообще не сможет работать.
3.2 Аналогия для понимания необходимости скольжения
Этот принцип можно сравнить и с бегом. Только когда человек впереди быстрее человека позади, он может дать толчок последнему; если скорости одинаковы, толчка нет, и человек позади остановится. Тот же принцип применим и к асинхронным двигателям. Ротор может вращаться; его основная функция — индуцированный ток и крутящий момент, создаваемые магнитным полем, пронизывающим ротор. Необходимым условием для этого является относительное движение, величина которого определяется коэффициентом скольжения.
3.3 Практический пример функции скольжения
В качестве практического примера рассмотрим асинхронный двигатель вентилятора. В нормальном режиме работы его коэффициент скольжения составляет от 1% до 3%, что обеспечивает стабильное относительное движение. Если лопасти вентилятора принудительно удерживать в прижатом положении, коэффициент скольжения достигает 100%, вызывая резкое увеличение тока. Двигатель будет пытаться вращать лопасти, но длительное удержание в прижатом положении может привести к его перегоранию. В этом и заключается основная функция коэффициента скольжения. Без него двигатель не обладает мощностью. Поэтому асинхронные двигатели должны иметь коэффициент скольжения во время работы; это необходимое условие для электромагнитной индукции и основной источник генерации крутящего момента. Это не недостаток, а необходимое условие для нормальной работы двигателя.
4.0 Теория синхронной скорости: почему она фиксирована? Какова её связь со скоростью скольжения?
4.1 Определение и характеристики синхронной скорости
Synchronous speed is the rotational speed of the rotating magnetic field. It is constant and also the basis for slip rate calculation and the key to understanding slip rate changes. Its size is determined by only two factors, and is independent of load and temperature:
4.1.1 Частота источника питания (f)
В Китае частота составляет 50 Гц (50 изменений в секунду). Чем выше частота, тем быстрее вращается магнитное поле и тем выше синхронная скорость.
4.1.2 Количество столбов
Указывает количество пар полюсов в обмотке. 2 полюса = 1 пара, 4 полюса = 2 пары. Чем больше полюсов, тем ниже синхронная скорость. Это будет четко указано на паспортной табличке двигателя.
4.2 Формула синхронной скорости и распространенные примеры
Формула синхронной скорости (простое понимание): Синхронная скорость = (60 × частота источника питания) ÷ количество пар полюсов. «60» преобразует частоту в секунду в скорость в минуту. Основная логика по-прежнему заключается в том, что «частота и количество полюсов определяют скорость». Распространенные примеры (китайский источник питания 50 Гц):
— 2-полюсный двигатель: синхронная скорость 3000 об/мин, нормальное скольжение при полной нагрузке 1%~3%, используется в высокоскоростном оборудовании;
— 4-полюсный двигатель: синхронная скорость 1500 об/мин, нормальное скольжение при полной нагрузке 3%~5%, наиболее распространенный двигатель в промышленном производстве;
— 6-полюсный двигатель: синхронная скорость 1000 об/мин, нормальное скольжение при полной нагрузке 3%~5%, используется в оборудовании со средней и низкой скоростью вращения.
4.3 Взаимосвязь между синхронной скоростью и скольжением
>Основная связь: синхронная скорость фиксирована, скольжение изменяется динамически. Ключевым фактором этого изменения является скорость вращения ротора, которая определяется нагрузкой. Например, 4-полюсный двигатель имеет постоянную синхронную скорость 1500 об/мин. В режиме холостого хода скорость вращения ротора близка к 1500 об/мин (чрезвычайно малое скольжение), при полной нагрузке — к 1440 об/мин (скольжение около 4%), а при перегрузке — ниже 1440 об/мин (скольжение < 1 > 5%).
5.0 Схема изменения коэффициента проскальзывания: напрямую зависит от нагрузки, автоматически регулируется.
5.1 Основное правило изменения скорости скольжения
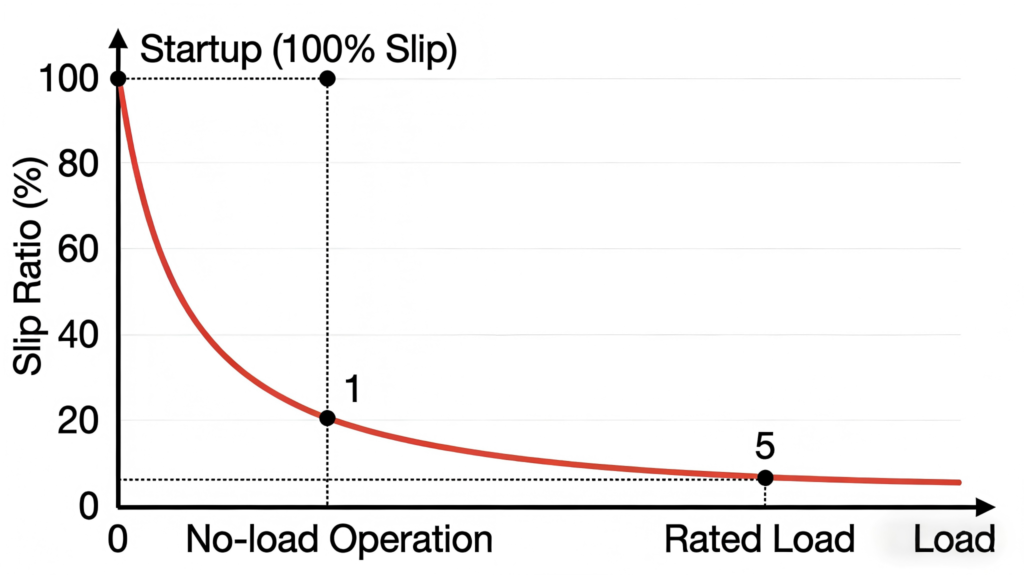
Коэффициент скольжения не является фиксированной величиной; его основным фактором является нагрузка, и он может автоматически регулироваться. Чем меньше нагрузка, тем меньше коэффициент скольжения; чем больше нагрузка, тем больше коэффициент скольжения. Регулировка не требует ручного управления, что является ключевым преимуществом асинхронных двигателей, основанным на теоретической логике «адаптивной нагрузки с электромагнитным моментом». Изменения коэффициента скольжения можно разделить на четыре распространенных режима работы, которые мы проанализируем и поймем, используя теорию и простые сценарии:
5.1.1 Мгновенный запуск: коэффициент проскальзывания составляет 100%.
Когда скорость вращения ротора равна 0, коэффициент скольжения равен (синхронная скорость — 0) ÷ синхронная скорость = 1, что является максимальным коэффициентом скольжения. В это время относительное движение достигает максимума, пусковой ток в 5-8 раз превышает номинальный ток, и генерируется максимальный пусковой момент для преодоления инерции ротора. На заводах при запуске крупных двигателей используется метод «пуска по схеме звезда-треугольник» для снижения пускового тока и защиты оборудования; это основано на теории пуска по коэффициенту скольжения.
5.1.2 Работа без нагрузки: коэффициент проскальзывания составляет 0,3%~1%
В режиме холостого хода ротору необходимо преодолевать только собственное трение и сопротивление воздуха. Требуемый крутящий момент относительно невелик, а скорость близка к синхронной, что приводит к очень малой скорости скольжения. Следовательно, ток холостого хода также невелик, а тепловыделение минимально. При осмотре двигателя запуск его в режиме холостого хода и наблюдение за скоростью, звуком и температурой позволяют оценить его основное состояние. Это практическое применение теории скорости скольжения.
5.1.3 Номинальная нагрузка: Коэффициент проскальзывания составляет 1%~5%
При работе двигателя под номинальной нагрузкой скорость вращения ротора стабильна, а коэффициент скольжения находится в оптимальном диапазоне. Электромагнитная индукция умеренная, КПД максимальный, а повышение температуры приемлемое. Например, высокоэффективный асинхронный двигатель серии Dayou YE3 (класс IE3), 4-полюсный, 50 Гц, имеет стабильный номинальный коэффициент скольжения около 4% и КПД более 90%, что делает его пригодным для длительной непрерывной промышленной эксплуатации. Он разработан на основе теории оптимального режима работы с учетом коэффициента скольжения.
>5.1.4 Работа в режиме перегрузки: Скольжение < 1 > 5%
Когда нагрузка превышает номинальное значение, ротор начинает вращаться с задержкой, что приводит к снижению скорости и увеличению проскальзывания. Это вызывает скачок индуцированного тока, увеличение потерь в двигателе и сильный перегрев. Длительная перегрузка может привести к выгоранию обмоток. Если вы заметили снижение скорости двигателя, перегрев корпуса и чрезмерный ток, это, скорее всего, связано с перегрузкой. В этом случае проверьте нагрузку или наличие механического заклинивания, чтобы оперативно устранить проблему.
6.0 Ключевая роль проскальзывания: на всех этапах проектирования, эксплуатации и технического обслуживания двигателя
6.1 Обзор основной роли скольжения
Роль скольжения имеет решающее значение на протяжении всего жизненного цикла двигателя. Каждая из этих ролей теоретически обоснована и тесно связана с практической эксплуатацией. Можно выделить четыре основные роли:
6.1.1 Единственное условие для генерации крутящего момента
Основная логическая цепочка: Скольжение → Относительное движение → Магнитное поле, воздействующее на ротор → Индуцированный ток → Электромагнитный крутящий момент → Вращение двигателя. Скольжение является отправной точкой этой логической цепочки. Без скольжения нет крутящего момента, и двигатель не может работать. Например, двигатель стиральной машины имеет 100% скольжение при запуске, создавая пусковой момент для привода внутреннего барабана. Во время работы скольжение составляет 1%–3%, обеспечивая стабильную работу.
6.1.2 Автоматическая адаптация к изменениям нагрузки
Асинхронные двигатели не требуют внешнего контроллера и могут автоматически регулировать скольжение в зависимости от нагрузки: по мере увеличения нагрузки скорость вращения ротора уменьшается, скольжение увеличивается, а крутящий момент возрастает до достижения равновесия; по мере уменьшения нагрузки скорость вращения ротора увеличивается, скольжение уменьшается, а крутящий момент возрастает до повторного достижения равновесия. Например, в вентиляторе цеха, когда двери и окна открыты (увеличенная нагрузка), скольжение автоматически увеличивается для обеспечения стабильного воздушного потока; когда двери и окна закрыты (сниженная нагрузка), скольжение уменьшается, что позволяет экономить энергию.
6.1.3 Определение характеристик пускового механизма двигателя
At startup, slip = 100%. Starting torque and starting current are closely related to the slip design. Designers optimize the rotor structure to ensure smooth starting characteristics. Dayou Motors also customizes its products for different scenarios to ensure starting performance is adapted to the operating conditions.
6.1.4 «Индикаторы состояния здоровья» для оценки двигательного состояния
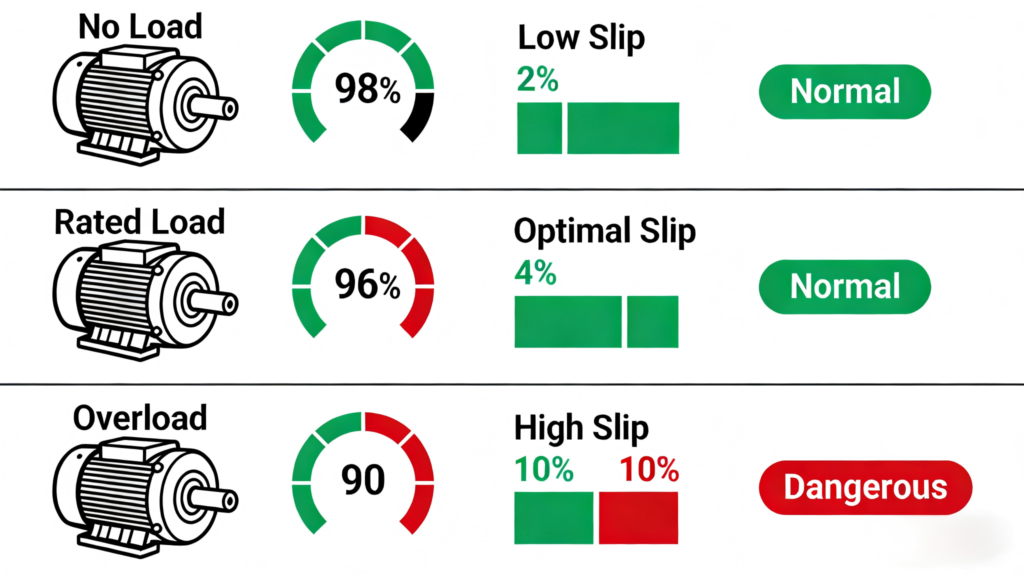
По характеру изменений скольжения мы можем быстро определить состояние двигателя:
При скольжении при полной нагрузке в пределах 1%–5% двигатель может работать в нормальном режиме.
<Когда скольжение без нагрузки составляет < 1 >1%, двигатель может работать в нормальном режиме, но длительная работа без нагрузки может привести к потерям энергии.
>Если проскальзывание при полной нагрузке составляет < 1 >5%, двигатель перегружен и требует поиска и устранения неисправности.
Если проскальзывание внезапно резко увеличивается, это может указывать на неисправность двигателя.
When the slip approaches 100%, the moment of startup may cause the motor to seize up and the windings to burn out.
7.0 Взаимосвязь между проскальзыванием и крутящим моментом: «Ключевой фактор» производительности двигателя
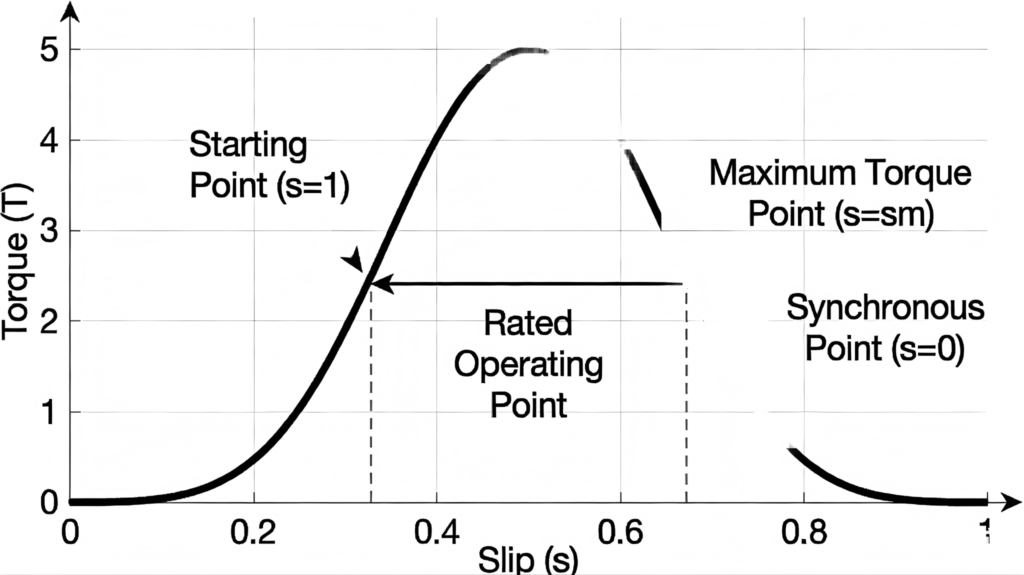
7.1 Обзор кривой скольжения-крутящего момента (кривой s-T)
Каждый асинхронный двигатель имеет «кривую скольжения-крутящего момента» (кривую s-T), которая является основой его характеристик, определяя пусковые характеристики, максимальный крутящий момент и диапазон устойчивости. Теоретическая логика ключевых узлов выглядит следующим образом:
7.1.1 Начальная точка (s=1): Соответствует начальному моменту
В момент запуска проскальзывание составляет 100%. Пусковой момент определяет возможность запуска двигателя: для запуска с малой нагрузкой (вентиляторы, водяные насосы) пусковой момент должен быть в 1,0–1,5 раза больше номинального момента; для запуска с большой нагрузкой (дробилки) он должен быть в 2,0–3,0 раза или более, чтобы обеспечить преодоление инерции.
7.1.2 Точка максимального крутящего момента (s=sm, критическое проскальзывание): Соответствующая точке максимального крутящего момента
Вершина кривой — это максимальный крутящий момент, то есть максимальная сила, которую может выдавать двигатель. Это определяет его перегрузочную способность. Если нагрузка превышает максимальный крутящий момент, двигатель заглохнет. Компания Dayou Motors оптимизирует кривую, стремясь улучшить максимальный крутящий момент, повысить перегрузочную способность и обеспечить стабильную работу даже при колебаниях нагрузки.
7.1.3 Номинальная рабочая точка (s = номинальное скольжение): соответствует номинальному крутящему моменту
Коэффициент скольжения 1%–5% соответствует номинальному крутящему моменту. Это точка, в которой двигатель обладает максимальной эффективностью и приемлемым повышением температуры, а также является оптимальной рабочей точкой. При выборе двигателя следует отдавать предпочтение модели с номинальным крутящим моментом, превышающим или равным крутящему моменту нагрузки, для обеспечения нормальной работы.
7.1.4 Точка синхронизации (s = 0): соответствует моменту крутящего момента = 0
Ротор и магнитное поле вращаются с одинаковой скоростью. Без крутящего момента двигатель остановится, что еще раз доказывает невозможность работы двигателя с коэффициентом скольжения, равным 0. Конструкторы разрабатывают кривую скольжения в зависимости от сценария. Для вентиляторов и водяных насосов требуются плавные кривые, а для дробилок — крутые. Каждый продукт от Dayou Motor может быть адаптирован к соответствующему сценарию для достижения эффекта оптимизации коэффициента скольжения.
8.0 Практический пример: Быстрое определение двигательного статуса с использованием теории
8.1 Обзор дела
Предположим, на заводе установлен 4-полюсный асинхронный двигатель с частотой 50 Гц, на паспортной табличке которого указаны номинальная скорость 1440 об/мин, скорость холостого хода 1490 об/мин и скорость перегрузки 1400 об/мин. Теоретически мы можем определить его состояние:
8.1.1 Расчет синхронной скорости
4-полюсный двигатель (2 пары полюсов), синхронная скорость 1500 об/мин (фиксированная);
8.1.2 Оценка статуса
1440 об/мин, около 1500 об/мин, коэффициент проскальзывания от 1% до 5%, норма;
8.1.3 Оценка состояния холостого хода
1490 об/мин, около 1500 об/мин, коэффициент проскальзывания 0,3%–1%, норма;
8.1.4 Оценка состояния перегрузки
>1400 об/мин — значительное отклонение от 1500 об/мин, коэффициент проскальзывания < 1 > 5%, опасно, требует остановки и осмотра.
8.2 Заключение по делу
Таким образом, как мы видим, поняв теорию скорости скольжения, мы можем быстро определить состояние двигателя без сложных вычислений.