















Si alguna vez ha trabajado con motores, especialmente con los motores asíncronos trifásicos que se utilizan habitualmente en la producción industrial, sin duda habrá oído hablar del «deslizamiento». Mucha gente se pregunta por primera vez qué es este término y puede tener varias ideas erróneas: ¿Qué es el deslizamiento? ¿Es una rotación imprecisa del motor? ¿O es una pérdida? ¿Es un defecto de diseño? Algunos creen erróneamente que cuanto menor sea el deslizamiento, mejor; idealmente, cero, para que un motor se considere perfecto.
En realidad, estas ideas son erróneas. El deslizamiento no es un defecto del motor; al contrario, es fundamental para el funcionamiento normal de un motor asíncrono y su capacidad para accionar una carga. Sin deslizamiento, un motor asíncrono no puede girar. En este artículo, analizaremos las teorías y principios fundamentales del deslizamiento, explicando con claridad todos los conocimientos y la experiencia relevantes. Además, combinaremos esto con nuestra experiencia de diseño en Dayou Motors para profundizar en la comprensión de la teoría y su aplicación práctica.
1.0 Primero, entienda: ¿Por qué se llama «asíncrono» a un motor asíncrono?
1.1 ¿Qué es un motor asíncrono?
Antes de comprender el deslizamiento, primero debemos entender el significado de asíncrono. Los motores asíncronos son el tipo de motor más utilizado y extendido a nivel mundial. Se emplean en más del 90 % de los ventiladores industriales, bombas, máquinas herramienta y electrodomésticos cotidianos como aires acondicionados y lavadoras. Sus principales ventajas son la fiabilidad, la simplicidad de su estructura y la facilidad de mantenimiento.
1.2 Principio de funcionamiento básico del motor asíncrono
El principio de funcionamiento fundamental de un motor asíncrono es la «inducción electromagnética». Consta principalmente de un estator y un rotor, y su lógica de funcionamiento implica cuatro pasos.
1.2.1 El estator genera un campo magnético giratorio.
En primer lugar, el estator se alimenta con corriente alterna, generando un campo magnético giratorio. Este campo magnético gira a una velocidad fija, conocida como «velocidad de rotación síncrona», determinada por la frecuencia de la fuente de alimentación y el número de polos.
1.2.2 El campo magnético giratorio corta los conductores del rotor.
En segundo lugar, el campo magnético giratorio corta continuamente los conductores del rotor para generar par electromagnético. Sin embargo, este corte requiere movimiento relativo, y debe existir una diferencia de velocidad entre el campo magnético y el rotor.
1.2.3 Proceso de conversión de energía
En tercer lugar, se completa el proceso de inducción de corriente en los conductores después del corte y la conversión de la energía eléctrica en energía del rotor.
1.2.4 El rotor genera par y gira
Finalmente, el rotor experimenta una fuerza tras inducir corriente en el campo magnético, generando un par electromagnético que impulsa la rotación del rotor y la carga. Es importante comprender que la velocidad síncrona del campo magnético giratorio siempre es mayor que la velocidad real del rotor; ambas no están sincronizadas, lo que da origen al término «motor asíncrono». Esta asincronía no es un defecto, sino una condición necesaria para el funcionamiento del motor. Sin movimiento relativo, no hay corte del campo magnético y, por lo tanto, no hay potencia.
1.3 Definición de deslizamiento y coeficiente de deslizamiento
La diferencia de velocidad entre el campo magnético y el rotor se denomina «deslizamiento»; la relación entre el deslizamiento y la velocidad síncrona se denomina «coeficiente de deslizamiento». En resumen, la fórmula es: Coeficiente de deslizamiento = (Velocidad síncrona – Velocidad real del rotor) ÷ Velocidad síncrona. Básicamente, representa el grado de retraso del rotor con respecto al campo magnético, midiendo la magnitud del movimiento relativo.
1.4 Analogía para comprender el deslizamiento
Por ejemplo, imaginemos a dos personas corriendo. La que va delante corre a velocidad constante, mientras que la que va detrás nunca puede alcanzarla. La diferencia de distancia entre ellas es el «deslizamiento», y la relación entre esta diferencia y la velocidad de la persona que va delante es el «coeficiente de deslizamiento». Si sus velocidades fueran iguales, la persona que va delante no proporcionaría ningún empuje y la que va detrás se detendría. Esto es totalmente coherente con la lógica de un motor asíncrono.
2.0 Teoría básica: ¿Cuál es la esencia de la relación de deslizamiento?
La clave del coeficiente de deslizamiento no reside en el cálculo de la fórmula, sino en el puente que lo conecta. En resumen, el deslizamiento es el puente para la conversión de energía en un motor asíncrono, que une la energía eléctrica y la mecánica. En pocas palabras, el deslizamiento es un indicador de la intensidad de la inducción electromagnética. Cuanto mayor sea el deslizamiento del motor, más rápido el campo magnético atraviesa el rotor, mayor será la corriente inducida en este y mayor el par motor. Por el contrario, cuanto menor sea el deslizamiento, menos eficiente será el motor.
3.0 Teoría clave: ¡Sin deslizamiento, un motor asíncrono no gira!
3.1 Malentendido común sobre el deslizamiento
Este es el punto que más se suele malinterpretar: el deslizamiento no es una falla ni un error; es la esencia del motor asíncrono, la razón fundamental por la que gira e impulsa la carga. Mucha gente piensa que cuanto menor sea el deslizamiento, mejor, incluso deseando que sea cero, lo cual es un error garrafal. Cuando el deslizamiento es cero, el motor se detiene inmediatamente y no puede funcionar en absoluto.
3.2 Analogía para comprender la necesidad del deslizamiento
Este concepto también se puede comparar con correr. Solo cuando la persona que va delante es más rápida que la que va detrás puede impulsarla; si las velocidades son iguales, no hay impulso y la persona que va detrás se detendrá. El mismo principio se aplica a los motores asíncronos. El rotor puede girar; su función principal es la corriente inducida y el par generados por el campo magnético que lo atraviesa. El requisito previo para este avance es el movimiento relativo, cuya magnitud está determinada por la tasa de deslizamiento.
3.3 Ejemplo práctico de función de deslizamiento
Como ejemplo práctico, el motor de un ventilador es asíncrono. En condiciones normales de funcionamiento, su deslizamiento oscila entre el 1 % y el 3 %, lo que resulta en un movimiento relativo estable. Si las aspas del ventilador se mantienen presionadas, el deslizamiento aumenta al 100 %, provocando un incremento brusco de la corriente. El motor intentará impulsar las aspas, pero mantenerlas presionadas durante un periodo prolongado podría dañarlo. Esta es la función principal del deslizamiento. Sin él, el motor no tiene potencia. Por lo tanto, los motores asíncronos deben tener deslizamiento durante su funcionamiento; es un requisito previo para la inducción electromagnética y la fuente fundamental de generación de par. Esto no es un defecto, sino una condición necesaria para el funcionamiento normal del motor.
4.0 La teoría de la velocidad síncrona: ¿Por qué es fija? ¿Cuál es su relación con la tasa de deslizamiento?
4.1 Definición y características de la velocidad síncrona
La velocidad síncrona es la velocidad de rotación del campo magnético giratorio. Es constante y constituye la base para el cálculo de la tasa de deslizamiento, así como la clave para comprender sus variaciones. Su magnitud está determinada únicamente por dos factores y es independiente de la carga y la temperatura.
4.1.1 Frecuencia de la fuente de alimentación (f)
50 Hz (con una frecuencia de 50 ciclos por segundo) en China. Cuanto mayor sea la frecuencia, más rápido girará el campo magnético y mayor será la velocidad síncrona.
4.1.2 Número de polos
Indica el número de pares de polos en el devanado secundario. 2 polos = 1 par, 4 polos = 2 pares. Cuantos más polos, menor será la velocidad síncrona. Esta información se indicará claramente en la placa de características del motor.
4.2 Fórmula de velocidad síncrona y ejemplos comunes
Fórmula de velocidad síncrona (comprensión sencilla): Velocidad síncrona = (60 × frecuencia de la fuente de alimentación) ÷ número de pares de polos. El «60» convierte la frecuencia por segundo en velocidad por minuto. La lógica fundamental sigue siendo que «la frecuencia y el número de polos determinan la velocidad». Ejemplos comunes (fuente de alimentación de 50 Hz en China):
– Motor de 2 polos: Velocidad síncrona de 3000 rpm, deslizamiento normal a plena carga del 1% al 3%, utilizado en equipos de alta velocidad;
– Motor de 4 polos: Velocidad síncrona de 1500 rpm, deslizamiento normal a plena carga del 3% al 5%, el motor más utilizado en la producción industrial;
– Motor de 6 polos: Velocidad síncrona de 1000 rpm, deslizamiento normal a plena carga del 3 % al 5 %, utilizado en equipos de velocidad media y baja.
4.3 Relación entre velocidad síncrona y deslizamiento
>Conexión del núcleo: La velocidad síncrona es fija, pero el deslizamiento varía dinámicamente. El factor clave de esta variación es la velocidad del rotor, que está determinada por la carga. Por ejemplo, un motor de 4 polos tiene una velocidad síncrona constante de 1500 rpm. En condiciones de vacío, la velocidad del rotor se aproxima a 1500 rpm (deslizamiento mínimo); a plena carga, se aproxima a 1440 rpm (deslizamiento de alrededor del 4%); y en condiciones de sobrecarga, es inferior a 1440 rpm (deslizamiento < 1 > 5%).
5.0 Patrón de variación de la tasa de deslizamiento: directamente relacionado con la carga, ajustable automáticamente.
5.1 Regla básica de variación de la tasa de deslizamiento
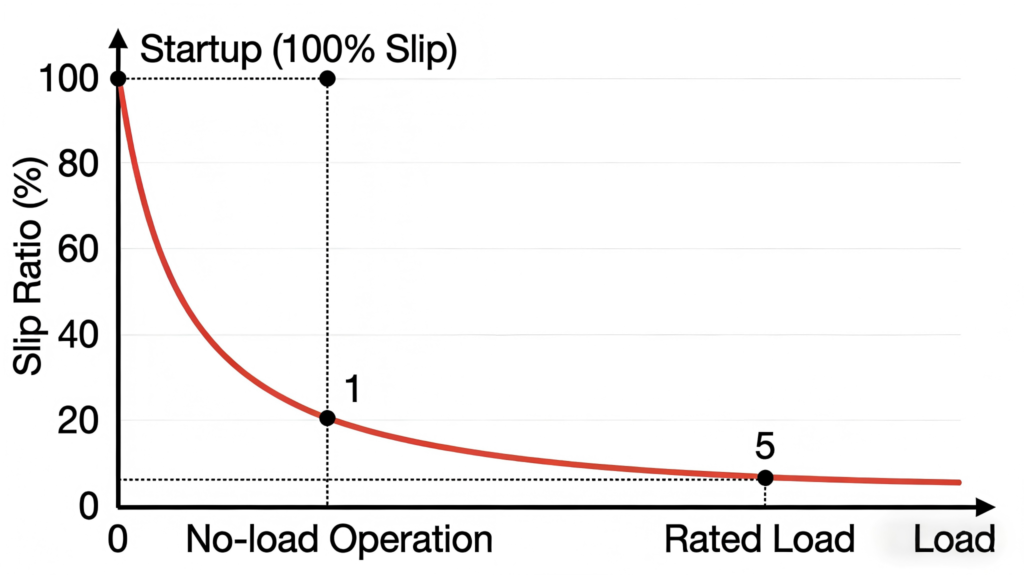
El deslizamiento no es un valor fijo; su principal factor determinante es la carga, y se ajusta automáticamente. Cuanto menor sea la carga, menor será el deslizamiento; cuanto mayor sea la carga, mayor será el deslizamiento. El ajuste no requiere intervención manual, lo cual constituye una ventaja fundamental de los motores asíncronos, respaldada por la lógica teórica de la «carga adaptativa de par electromagnético». Las variaciones del deslizamiento se pueden clasificar en cuatro condiciones de funcionamiento comunes, que analizaremos y comprenderemos mediante la teoría y ejemplos sencillos:
5.1.1 Arranque instantáneo: la tasa de deslizamiento es del 100 %.
Cuando la velocidad del rotor es cero, el deslizamiento = (velocidad síncrona – cero) ÷ velocidad síncrona = 1, que es el deslizamiento máximo. En este momento, el movimiento relativo es máximo, la corriente de arranque es de 5 a 8 veces la corriente nominal y se genera el par de arranque máximo para vencer la inercia del rotor. Las fábricas utilizan el arranque estrella-triángulo para arrancar motores grandes con el fin de reducir la corriente de arranque y proteger el equipo; esto se basa en la teoría del deslizamiento.
5.1.2 Funcionamiento sin carga: La tasa de deslizamiento es del 0,3% al 1%.
Sin carga, el rotor solo necesita superar su propia fricción y la resistencia del aire. El par requerido es relativamente pequeño y la velocidad es cercana a la velocidad síncrona, lo que resulta en un deslizamiento muy bajo. Por lo tanto, la corriente en vacío también es baja y la generación de calor es mínima. Al inspeccionar un motor, arrancarlo sin carga y observar la velocidad, el sonido y la temperatura permite evaluar su estado básico. Esta es una aplicación práctica de la teoría del deslizamiento.
5.1.3 Carga nominal: La tasa de deslizamiento es del 1% al 5%.
Cuando el motor funciona bajo carga nominal, la velocidad del rotor es estable y el deslizamiento se mantiene dentro del rango óptimo. La inducción electromagnética es moderada, la eficiencia es máxima y el aumento de temperatura es razonable. Por ejemplo, el motor asíncrono de alta eficiencia Dayou serie YE3 (clase IE3), de 4 polos y 50 Hz, presenta un deslizamiento nominal estable en torno al 4 % y una eficiencia superior al 90 %, lo que lo hace idóneo para un funcionamiento industrial continuo a largo plazo. Su diseño se basa en la teoría de funcionamiento óptimo del deslizamiento.
>5.1.4 Operación de sobrecarga: Deslizamiento < 1 > 5%
Cuando la carga supera el valor nominal, el rotor se arrastra, lo que provoca una disminución de la velocidad y un aumento del deslizamiento. Esto genera un pico de corriente inducida, mayores pérdidas en el motor y un sobrecalentamiento severo. Una sobrecarga prolongada puede quemar los devanados. Si observa una disminución en la velocidad del motor, sobrecalentamiento de la carcasa y una corriente excesiva, es muy probable que se deba a una sobrecarga. En este caso, verifique la carga o el bloqueo mecánico para solucionar el problema de inmediato.
6.0 El papel fundamental del deslizamiento: en el diseño, uso y mantenimiento del motor.
6.1 Descripción general del papel principal del deslizamiento
El deslizamiento desempeña un papel crucial a lo largo de todo el ciclo de vida de un motor. Cada función cuenta con respaldo teórico y está estrechamente relacionada con el funcionamiento práctico. Se pueden resumir cuatro funciones principales:
6.1.1 El único requisito previo para la generación de par
Cadena lógica principal: Deslizamiento → Movimiento relativo → Campo magnético que corta el rotor → Corriente inducida → Par electromagnético → Rotación del motor. El deslizamiento es el punto de partida de esta cadena lógica. Sin deslizamiento, no hay par y el motor no puede funcionar. Por ejemplo, el motor de una lavadora tiene un deslizamiento del 100 % al arrancar, generando un par inicial para accionar el tambor interior. Durante el funcionamiento, el deslizamiento es del 1 % al 3 %, lo que garantiza un funcionamiento estable.
6.1.2 Adaptación automática a los cambios de carga
Los motores asíncronos no requieren controlador externo y ajustan automáticamente el deslizamiento en función de la carga: a medida que aumenta la carga, la velocidad del rotor disminuye, el deslizamiento aumenta y el par aumenta hasta alcanzar el equilibrio; a medida que disminuye la carga, la velocidad del rotor aumenta, el deslizamiento disminuye y el par disminuye hasta alcanzar nuevamente el equilibrio. Por ejemplo, en un ventilador de taller, cuando las puertas y ventanas están abiertas (mayor carga), el deslizamiento aumenta automáticamente para garantizar un flujo de aire estable; cuando las puertas y ventanas están cerradas (menor carga), el deslizamiento disminuye, ahorrando energía.
6.1.3 Determinación del rendimiento de arranque del motor
At startup, slip = 100%. Starting torque and starting current are closely related to the slip design. Designers optimize the rotor structure to ensure smooth starting characteristics. Dayou Motors also customizes its products for different scenarios to ensure starting performance is adapted to the operating conditions.
6.1.4 Indicadores de «Verificación de Salud» para Evaluar el Estado del Motor
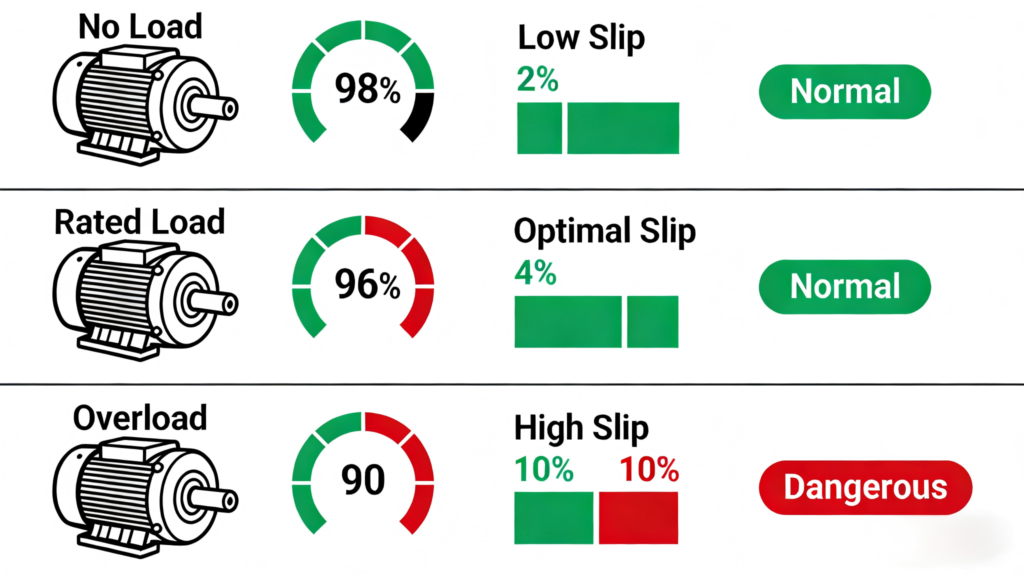
Podemos determinar rápidamente el estado del motor basándonos en el patrón de cambios de deslizamiento:
When the full-load slip is 1%~5%, the motor can operate normally.
<Cuando el deslizamiento en vacío es del 1%, el motor puede funcionar con normalidad, pero un funcionamiento prolongado en vacío puede suponer un desperdicio de energía.
>Cuando el deslizamiento a plena carga es < 1 >5%, el motor está sobrecargado y requiere solución de problemas.
Cuando el deslizamiento aumenta bruscamente de forma repentina, es posible que el motor esté funcionando mal.
Cuando el deslizamiento se acerca al 100%, el momento del arranque puede provocar que el motor se bloquee y que los devanados se quemen.
7.0 Relación entre deslizamiento y par motor: La «tarjeta de presentación» del rendimiento del motor
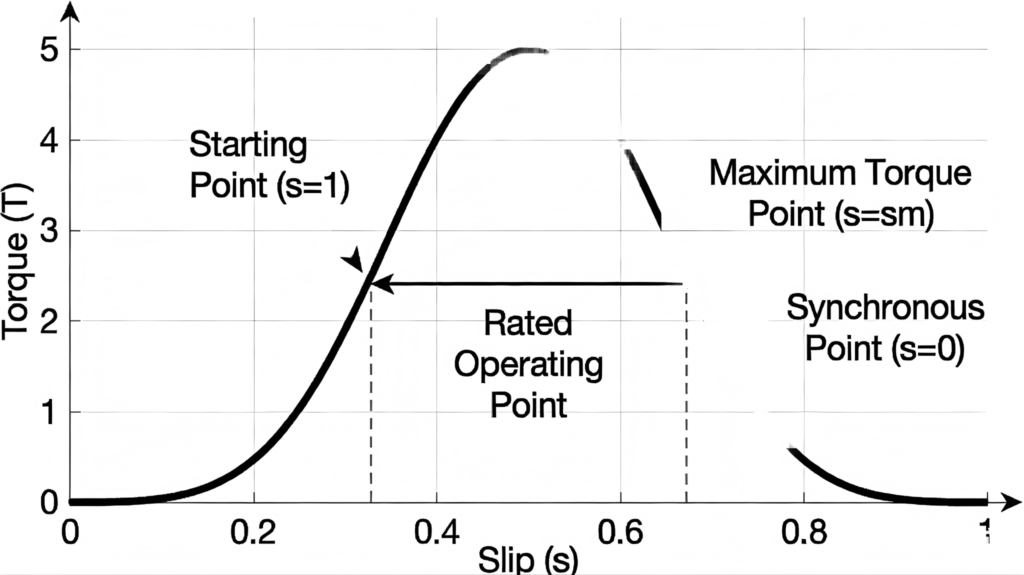
7.1 Descripción general de la curva de par de deslizamiento (curva s-T)
Cada motor asíncrono posee una «curva de deslizamiento-par» (curva s-T), que constituye la base de su rendimiento, determinando el arranque, el par máximo y el rango de estabilidad. La lógica teórica de los nodos clave es la siguiente:
7.1.1 Punto de partida (s=1): Correspondiente al par de arranque
En el momento del arranque, el deslizamiento es del 100%. El par de arranque determina si el motor puede arrancar: para arranques con carga ligera (ventiladores, bombas de agua), el par de arranque es de 1,0 a 1,5 veces el par nominal; para arranques con carga pesada (trituradoras), debe ser de 2,0 a 3,0 veces o más para garantizar la superación de la inercia.
7.1.2 Punto de par máximo (s=sm, deslizamiento crítico): Correspondiente al par máximo
El punto más alto de la curva representa el par máximo, que es la fuerza máxima que el motor puede generar. Esto determina su capacidad de sobrecarga. Si la carga supera el par máximo, el motor se detendrá. Dayou Motors optimiza la curva para mejorar el par máximo, aumentar la capacidad de sobrecarga y garantizar un funcionamiento estable incluso ante fluctuaciones de carga.
7.1.3 Punto de funcionamiento nominal (s = Deslizamiento nominal): Corresponde al par nominal
Un deslizamiento del 1 % al 5 % corresponde al par nominal. Este es el punto donde el motor alcanza su máxima eficiencia y un aumento de temperatura razonable, y también es el punto de funcionamiento óptimo. Al seleccionar un motor, debemos elegir uno con un par nominal mayor o igual al par de carga para garantizar un funcionamiento normal.
7.1.4 Punto de sincronización (s = 0): Corresponde a par = 0
El rotor y el campo magnético giran a la misma velocidad. Sin par motor, el motor deja de girar, lo que demuestra que un motor con un deslizamiento nulo no puede funcionar. Los diseñadores adaptan la curva de deslizamiento a diferentes escenarios. Los ventiladores y las bombas de agua requieren curvas suaves, mientras que las trituradoras requieren curvas pronunciadas. Cada producto de Dayou Motor se puede adaptar al escenario correspondiente para optimizar el deslizamiento.
8.0 Caso práctico: Determinación rápida del estado motor mediante la teoría
8.1 Resumen del caso
Supongamos que una fábrica tiene un motor asíncrono de 4 polos y 50 Hz con una placa de características que indica una velocidad nominal de 1440 rpm, una velocidad en vacío de 1490 rpm y una velocidad de sobrecarga de 1400 rpm. Podemos usar la teoría para determinar su estado:
8.1.1 Cálculo de la velocidad síncrona
Motor de 4 polos (2 pares de polos), velocidad síncrona de 1500 rpm (fija);
8.1.2 Juicio sobre el estado calificado
1440 rpm cerca de 1500 rpm, tasa de deslizamiento entre 1% y 5%, normal;
8.1.3 Determinación del estado sin carga
1490 rpm cerca de 1500 rpm, tasa de deslizamiento del 0,3% al 1%, normal;
8.1.4 Evaluación del estado de sobrecarga
>1400 rpm se desvía significativamente de 1500 rpm, tasa de deslizamiento < 1 > 5%, peligroso, requiere parada e inspección.
8.2 Conclusión del caso
Por lo tanto, como podemos ver, una vez que entendemos la teoría de la tasa de deslizamiento, podemos determinar rápidamente el estado del motor sin cálculos complejos.