
- Главная
- Продукт
- Двигатель стандарта ГОСТ
- Двигатель стандарта IEC
 Однофазный асинхронный двигатель серии MC с пусковым конденсатором
Однофазный асинхронный двигатель серии MC с пусковым конденсатором- Однофазный асинхронный двигатель серии MY/MYT с рабочим конденсатором
- Однофазный асинхронный двигатель серии ML с двумя конденсаторами
- Трёхфазный двигатель серии ME2 с алюминиевым корпусом, высокая эффективность
- Трёхфазный двигатель серии ME3 с алюминиевым корпусом, высокая эффективность
- Трёхфазный двигатель серии YE2 с чугунным корпусом, высокая эффективность (IE2)
- Трёхфазный двигатель серии MS с алюминиевым корпусом (IE1) .
- Трёхфазный двигатель серии Y2 с чугунным корпусом (IE1)
- Трёхфазный двигатель серии YE3 с чугунным корпусом, высокая эффективность (IE3)
- Двигатель специального назначения
- Двигатель для роллетных ворот
- Промышленное применение
- Новости
- О нас
- Свяжитесь с нами














Серводвигатели против асинхронных двигателей
В промышленной автоматизации, интеллектуальном производстве и различных сценариях привода электродвигатели, как основные компоненты, преобразующие электрическую энергию в механическую, напрямую определяют точность, эффективность и стабильность работы оборудования. Серводвигатели и асинхронные двигатели являются двумя наиболее распространенными типами двигателей, доминирующими в областях высокоточного управления и привода общего назначения соответственно. Серводвигатели отдают приоритет точной управляемости, следуя пути совершенствования в высокотехнологичном производстве; в то время как асинхронные двигатели делают акцент на стабильности, надежности и экономичности, становясь «основой силовой установки» в промышленном производстве и гражданских приложениях. В данной статье всесторонне анализируются различия и взаимосвязи между двумя типами двигателей с таких аспектов, как структурный состав, принцип работы, основные характеристики, сценарии применения и принципы выбора, что служит ориентиром для выбора в практических приложениях.
1. Основной обзор позиционирования и классификации двигателей.
Электродвигатель — это электромагнитное устройство, преобразующее электрическую энергию в механическую на основе закона электромагнитной индукции. В зависимости от области применения его можно разделить на силовые двигатели и двигатели управления. Асинхронные двигатели относятся к категории силовых двигателей, их основная функция заключается в преобразовании электрической энергии в механическую для обеспечения непрерывного и стабильного электропитания различного оборудования. В настоящее время асинхронные двигатели широко используются в машиностроении, бытовой технике и энергетических системах. Серводвигатели, с другой стороны, относятся к категории двигателей управления. Их основная функция заключается в точном управлении положением, скоростью и крутящим моментом в замкнутом контуре под действием управляющих сигналов. Они являются высокотехнологичным оборудованием автоматизации и основными исполнительными механизмами в прецизионном производственном оборудовании.
С точки зрения рыночного применения, асинхронные двигатели, благодаря своим преимуществам простой конструкции и высокой надежности, постепенно заняли более 70% мирового рынка промышленных двигателей и стали наиболее основным источником энергии в промышленном производстве. В настоящее время серводвигатели находят все большее применение в связи с ростом спроса на модернизацию промышленной автоматизации, а их использование в высокотехнологичных станках и промышленных роботах становится все более распространенным, превращаясь в важный показатель производственных возможностей. Эти два типа двигателей имеют разные области применения, дополняя друг друга и совместно удовлетворяя разнообразные потребности промышленного производства.
2. Структурные различия между серводвигателями и асинхронными двигателями
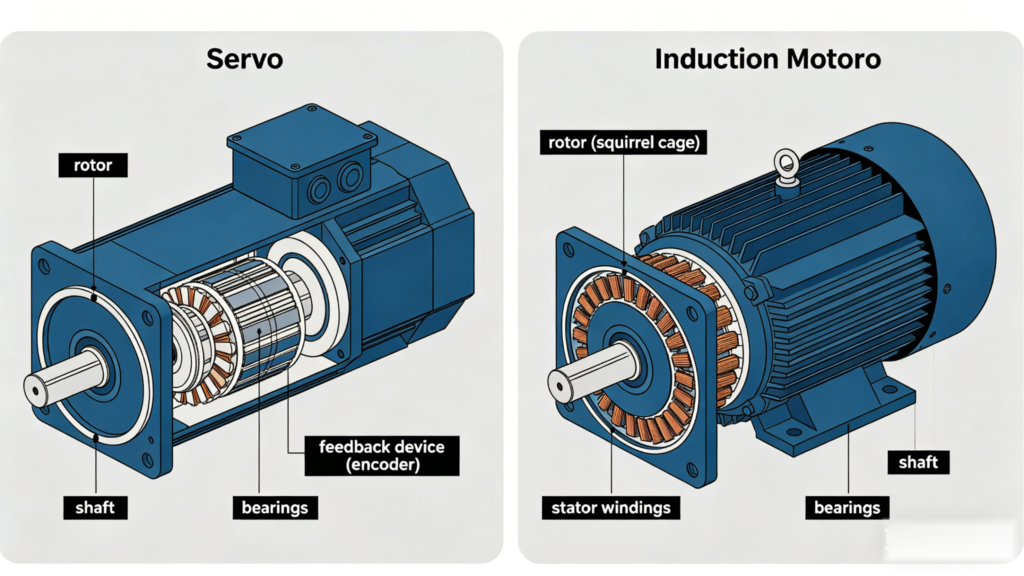
Как известно, различные конструкции двигателей приводят к различным характеристикам их работы. Хотя оба типа двигателей состоят из основных компонентов, таких как статоры, роторы, корпуса и подшипники, конструкция, материалы и функции их основных компонентов значительно различаются, что является основной причиной различий в их производительности.
2.1 Структурный состав сервомоторов
Сервомотор представляет собой полноценную систему управления и выполнения. Помимо корпуса двигателя, он может интегрировать высокоточные элементы обратной связи и требует специального сервопривода для обеспечения точного управления всеми тремя компонентами.
Первый компонент — это корпус двигателя. Статор изготовлен из нескольких слоев изолированных листов кремниевой стали со встроенными трехфазными обмотками. Подача переменного тока генерирует вращающееся магнитное поле. В роторе обычно используются постоянные магниты из неодима, железа и бора, расположенные в определенном количестве пар полюсов для повышения эффективности и скорости отклика. Корпус герметичен, что обеспечивает баланс между теплоотводом, вибростойкостью и герметичностью, делая его пригодным для сложных промышленных условий.
Второй компонент — это элемент обратной связи, который представляет собой «глаз» двигателя. Он собирает информацию о положении и скорости ротора в реальном времени и передает ее обратно драйверу. Инкрементальные энкодеры определяют положение по количеству импульсов, но требуют опорной точки; абсолютные энкодеры напрямую выдают уникальный код положения, сохраняя его даже после отключения питания. В высокоточных системах в основном используются 17-битные или более совершенные модели, обеспечивающие позиционирование на нанометровом уровне.
Второй компонент — это элемент обратной связи, который представляет собой «глаз» двигателя. Он собирает информацию о положении и скорости ротора в реальном времени и передает ее обратно драйверу. Инкрементальные энкодеры определяют положение по количеству импульсов, но требуют опорной точки; абсолютные энкодеры напрямую выдают уникальный код положения, сохраняя его даже после отключения питания. В высокоточных системах в основном используются 17-битные или более совершенные модели, обеспечивающие позиционирование на нанометровом уровне.
2.2 Структурное строение асинхронных двигателей
Асинхронные двигатели имеют относительно простую конструкцию. Им не требуются элементы обратной связи или специальные драйверы; основными компонентами являются только статор, ротор и корпус. При проектировании приоритет отдается простоте и надежности.
Во-первых, статор. Его структура аналогична структуре статора серводвигателя, но конструкция обмотки больше ориентирована на эффективность выработки мощности. Диаметр проволоки и количество витков рассчитываются в соответствии с номинальной мощностью для обеспечения долговременной стабильности работы.
Во-вторых, ротор можно разделить на ротор с короткозамкнутым ротором и ротор с обмоткой. Ротор с короткозамкнутым ротором является наиболее распространенным; он состоит из направляющих и кольцевых торцевых колец, изготовленных методом литья алюминия, что обеспечивает простую конструкцию и относительно низкий процент отказов. Обмотки ротора ротора с обмоткой могут выводиться через контактные кольца и щетки, а для улучшения характеристик запуска и регулирования скорости могут быть подключены резисторы. Он подходит для мощных систем и частых запусков.
Наконец, имеются вспомогательные компоненты. Корпус в основном изготовлен из чугуна, что обеспечивает превосходное рассеивание тепла. Используются износостойкие шарикоподшипники с глубоким пазом, что упрощает техническое обслуживание. Мощные модели могут быть оснащены вентиляторами охлаждения для обеспечения отвода тепла при высоких нагрузках. Простая конструкция обеспечивает преимущества в стоимости и надежности.
2.3 Краткое описание основных структурных различий
В основе серводвигателей лежит замкнутая система управления, что приводит к сложной и дорогостоящей конструкции. Асинхронные двигатели отдают приоритет простоте и надежности, не требуя элементов обратной связи или специальных драйверов, что приводит к более простой конструкции и меньшей стоимости. Это различие напрямую определяет разницу в точности управления и скорости реакции между ними.
3. Различия в принципах работы серводвигателей и асинхронных двигателей
Оба типа двигателей работают на основе закона электромагнитной индукции, но их различное строение приводит к принципиальным различиям в методах преобразования энергии и логике управления: асинхронные двигатели обеспечивают простое преобразование электрической энергии в механическую, не требуя точного управления; серводвигатели, с другой стороны, обеспечивают точное управление движением посредством обратной связи с замкнутым контуром.
3.1 Принцип работы сервомоторов
Серводвигатели, по сути, приводятся в движение электромагнитной индукцией в рамках замкнутой системы управления. Основной механизм устраняет ошибки за счет тройного замкнутого контура управления, состоящего из четырех этапов: во-первых, драйвер получает и анализирует команды управления от главного компьютера; во-вторых, на обмотки статора подается определенный переменный ток, генерирующий вращающееся магнитное поле, которое приводит во вращение постоянный магнит ротора; в-третьих, энкодер собирает и передает фактические рабочие параметры; в-четвертых, драйвер корректирует выходной сигнал на основе ошибки, исправляя рабочее состояние ротора. Время отклика на запуск/остановку составляет миллисекунды, а его перегрузочная способность может достигать трехкратного номинального крутящего момента, что соответствует требованиям высокоскоростного и высокоточного управления.
3.2 Принцип работы асинхронных двигателей
Асинхронные двигатели обеспечивают управление в режиме разомкнутой цепи на основе «электромагнитной индукции»: переменный ток подается на трехфазные обмотки статора для создания синхронного вращающегося магнитного поля. Проводники ротора, благодаря относительному движению относительно магнитного поля, генерируют индуцированный ток, который затем приводится во вращение электромагнитной силой. Ключевой характеристикой является скольжение. В нормальном режиме работы скольжение составляет от 0,01 до 0,05, что приводит к колебаниям скорости в зависимости от нагрузки. Естественно, эффективность регулирования скорости при этом низкая. При использовании частотного преобразователя можно добиться бесступенчатого регулирования скорости, но его точность значительно уступает точности серводвигателя, а КПД и коэффициент мощности низки при малых нагрузках.
3.3 Краткое изложение основных различий в принципах работы
Серводвигатели — это приводы с замкнутым контуром управления, способные к коррекции ошибок в реальном времени; асинхронные двигатели — это приводы с разомкнутым контуром управления, обеспечивающие только выходную мощность. Эти различия в принципах их работы определяют различные сценарии их применения.
4. Сравнение основных характеристик серводвигателей и асинхронных двигателей.
Из-за различий в конструкции и принципе работы серводвигатели и асинхронные двигатели имеют существенные различия в своих основных характеристиках, которые напрямую определяют области их применения. Конкретное сравнение приведено ниже:
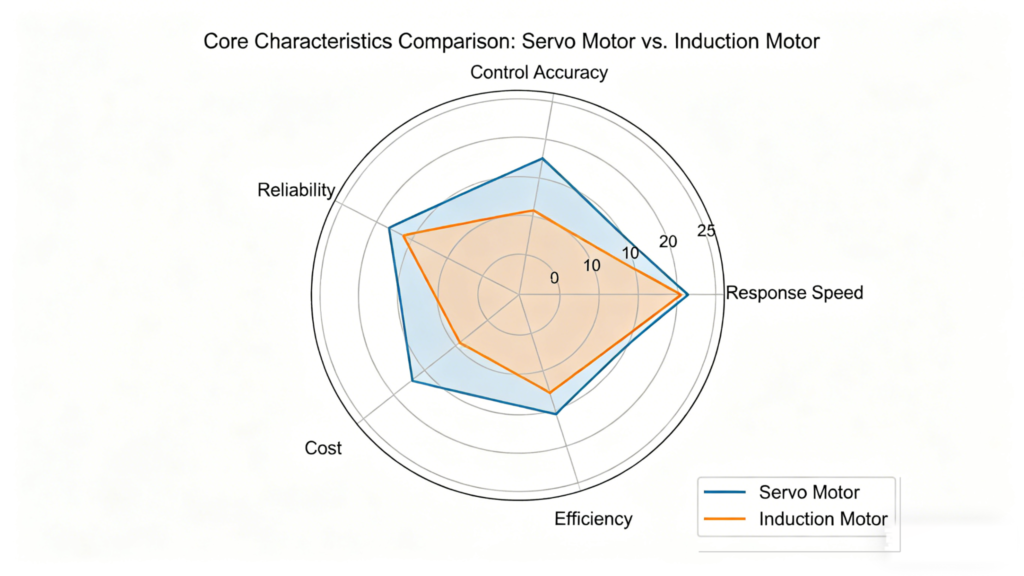
4.1 Точность управления
Серводвигатели обладают очень высокой точностью, определяемой разрешением энкодера. Они позволяют достигать позиционирования на нанометровом уровне и точного управления скоростью с точностью ниже 0,1 об/мин, используя тройную замкнутую систему управления для устранения ошибок, что делает их подходящими для различных сценариев, таких как прецизионная сборка. Асинхронные двигатели используют разомкнутую систему управления, с точностью скорости всего от ±1% до ±5%, и даже с частотным преобразователем она достигает лишь ±0,5%, что не может удовлетворить требованиям высокой точности.
4.2 Скорость отклика
Серводвигатели обладают временем отклика на пуск-остановку от 10 до 50 миллисекунд, превосходными характеристиками ускорения и подходят для высокоскоростных режимов работы с частыми пусками и остановками. Асинхронным двигателям для запуска необходимо преодолеть значительную инерцию, время отклика составляет от нескольких секунд до десятков секунд, что делает их подходящими для длительной непрерывной работы, не требующей частых пусков и остановок.
4.3 Эффективность и энергопотребление
Серводвигатели имеют КПД от 90% до 98%, сохраняя высокую эффективность даже при малых нагрузках. Их коэффициент мощности близок к 1, что приводит к низкому энергопотреблению. Асинхронные двигатели имеют КПД от 75% до 90%, но он значительно снижается при малых нагрузках. Их коэффициент мощности составляет от 0,7 до 0,9. При номинальной нагрузке разница в энергопотреблении между серводвигателями и асинхронными двигателями незначительна.
4.4 Стоимость и техническое обслуживание
Серводвигатели стоят в 3-5 раз дороже, чем асинхронные двигатели той же мощности. Энкодер и драйвер составляют большую часть стоимости, что усложняет техническое обслуживание и требует регулярной калибровки специалистами. Асинхронные двигатели стоят всего 1/3-1/5 от этой цены, имеют простую конструкцию, низкий процент отказов и требуют лишь регулярных проверок смазки и теплоотвода, что приводит к чрезвычайно низким затратам на техническое обслуживание.
4.5 Надежность и адаптивность к окружающей среде
Серводвигатели имеют более сложную конструкцию, а их прецизионные компоненты предъявляют высокие требования к условиям эксплуатации, будучи чувствительными к высоким температурам, пыли и вибрации. Асинхронные двигатели имеют более прочную конструкцию, не содержат прецизионных деталей и могут адаптироваться к суровым промышленным условиям, что приводит к более низкому уровню отказов при длительной эксплуатации.
4.6 Характеристики нагрузки
Серводвигатели обладают высокой перегрузочной способностью, что делает их подходящими для условий с большими колебаниями нагрузки и частыми ускорениями/замедлениями. Асинхронные двигатели имеют более низкую перегрузочную способность, что делает их подходящими для условий с постоянной нагрузкой без серьезных ударных воздействий.
5. Сценарии применения серводвигателей и асинхронных двигателей
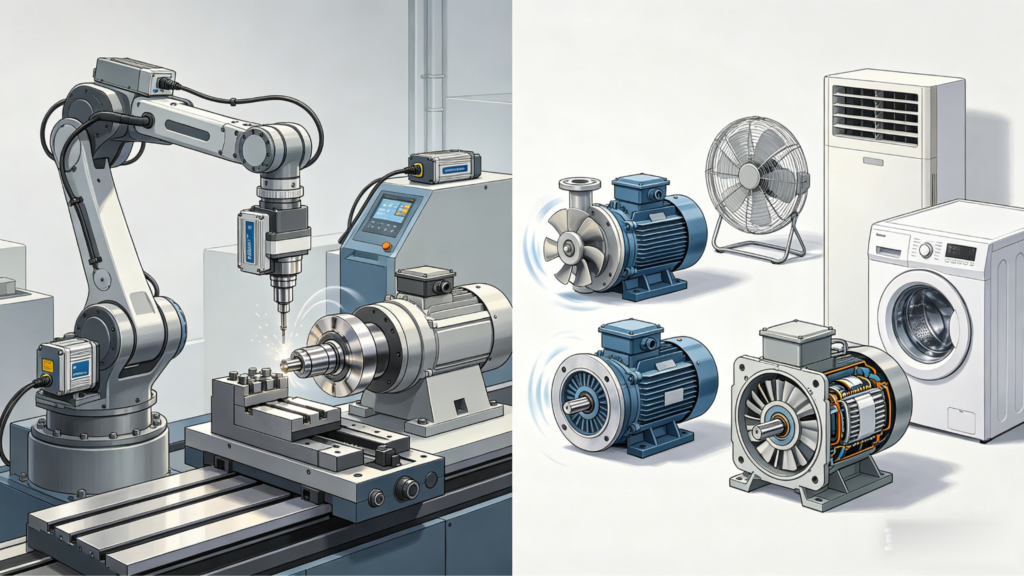
5.1 Типичные сценарии применения серводвигателей
Серводвигатели отличаются высокой точностью, быстродействием и высокой перегрузочной способностью, и используются в основном в высокотехнологичном производстве и автоматизации: промышленных роботах, станках с ЧПУ, полупроводниковом оборудовании, электронном производственном оборудовании и оборудовании для возобновляемой энергетики. Они также применяются в прецизионных приборах и медицинском оборудовании.
5.2 Типичные сценарии применения асинхронных двигателей
Асинхронные двигатели, благодаря своей простоте, надежности и высокой экономичности, используются в самых разных областях: промышленном оборудовании (насосы, вентиляторы, конвейерные ленты и т. д., основные источники питания), бытовой технике (стиральные машины, кондиционеры и т. д., удовлетворяющие ежедневные потребности в электроэнергии), энергетических системах и железнодорожном транспорте (вентиляторы охлаждения и т. д., адаптированные к высоким требованиям к мощности), сельскохозяйственной технике (тракторы, водяные насосы и т. д., устойчивые к суровым условиям окружающей среды). Кроме того, в приводной системе Tesla Model S/X также используются асинхронные двигатели, что расширяет область их применения в высокотехнологичных областях.
6. Принципы и соображения по выбору серводвигателей и асинхронных двигателей
6.1 Основные принципы отбора
- Для обеспечения точности управления выберите сервомотор для точного управления и асинхронный двигатель только для привода.
- В зависимости от характеристик нагрузки: для больших колебаний нагрузки и частых пусков и остановок выбирайте серводвигатель, а для постоянных нагрузок и длительной работы — асинхронный двигатель.
- В зависимости от бюджета: при достаточном бюджете и высокой точности выбирайте серводвигатель, а при ограниченном бюджете и высокой надежности — асинхронный двигатель, учитывая также долгосрочное энергопотребление.
- В зависимости от условий окружающей среды: для работы в суровых условиях выбирайте асинхронный двигатель, а для чистых и высокоточных задач — серводвигатель с надлежащей защитой.
6.2 Критерии выбора
При выборе серводвигателя необходимо четко определить требования к управлению, обеспечить соответствие точности энкодера и драйвера, а также учесть коэффициент инерции нагрузки. Выбор асинхронного двигателя требует определения мощности и количества полюсов, подбора инвертора в соответствии с конкретными потребностями, приоритета высокоэффективных моделей, таких как IE3/IE4, и соответствующей установки в соответствии с требованиями заказчика.
7. Тенденции развития отрасли и перспективы на будущее.
В условиях развития промышленной автоматизации и политики энергосбережения и защиты окружающей среды оба типа двигателей стремятся к повышению точности, эффективности и интеллектуальности. Серводвигатели ориентированы на высокую точность, высокую скорость отклика, миниатюризацию, малый вес и интеллектуальное энергосбережение. Благодаря сочетанию искусственного интеллекта и технологии многоосевой синхронизации они находят применение в относительно высокотехнологичных областях. Асинхронные двигатели, с другой стороны, делают упор на повышение энергоэффективности, более интеллектуальные усовершенствования и специализированные разработки, что позволяет им плавно адаптироваться к потребностям различных отраслей промышленности. В то же время появление интегрированных продуктов, таких как серво- и асинхронные двигатели, сочетает в себе преимущества обоих типов, расширяя сферу применения в сценариях управления среднего уровня.
8. Заключение
Серводвигатели и асинхронные двигатели имеют свои преимущества. Серводвигатели используют точное управление для поддержки высокотехнологичного производства, а асинхронные двигатели обеспечивают стабильное и экономичное электропитание для общего применения. В практических приложениях мы должны делать научный выбор на основе точности управления, характеристик нагрузки, бюджета затрат и условий окружающей среды. В будущем серводвигатели и асинхронные двигатели будут продолжать оптимизироваться и модернизироваться, обеспечивая более мощную энергетическую поддержку промышленной автоматизации и интеллектуального производства, а также повышая эффективность, точность и надежность оборудования.