















Wer schon einmal mit Motoren gearbeitet hat, insbesondere mit den in der industriellen Fertigung häufig eingesetzten Drehstrom-Asynchronmotoren, hat sicherlich schon einmal von „Schlupf“ gehört. Viele sind jedoch zum ersten Mal mit diesem Begriff vertraut und haben möglicherweise verschiedene Missverständnisse: Was ist Schlupf? Bedeutet er eine ungenaue Motorrotation? Oder handelt es sich um einen Verlust? Ist es ein Konstruktionsfehler? Manche glauben fälschlicherweise, je geringer der Schlupf, desto besser, idealerweise null, damit ein Motor als perfekt gilt.
Diese Annahmen sind tatsächlich unzutreffend. Schlupf ist kein Defekt des Motors; im Gegenteil, er ist die entscheidende Voraussetzung für den reibungslosen Betrieb eines Asynchronmotors und seine Fähigkeit, eine Last anzutreiben. Ohne Schlupf kann sich ein Asynchronmotor nicht drehen. In diesem Artikel erläutern wir die grundlegenden Theorien und Prinzipien des Schlupfs und erklären alle relevanten Erkenntnisse und Erfahrungen anschaulich. Wir verknüpfen dies außerdem mit unserer Entwicklungserfahrung bei Dayou Motors, um unser Verständnis der Theorie und ihrer praktischen Anwendung zu vertiefen.
1.0 Zunächst einmal: Warum wird ein Asynchronmotor als „Asynchronmotor“ bezeichnet?
1.1 Was ist ein Asynchronmotor?
Bevor wir den Schlupf verstehen, sollten wir zunächst den Begriff „Asynchronmotor“ klären. Asynchronmotoren sind weltweit die am weitesten verbreitete Motorenart. Sie werden in über 90 % aller Fabrikventilatoren, Pumpen, Werkzeugmaschinen und Haushaltsgeräte wie Klimaanlagen und Waschmaschinen eingesetzt. Ihre Hauptvorteile sind Zuverlässigkeit, einfacher Aufbau und Wartungsfreundlichkeit.
1.2 Grundlegendes Funktionsprinzip des Asynchronmotors
Das grundlegende Funktionsprinzip eines Asynchronmotors ist die „elektromagnetische Induktion“. Er besteht hauptsächlich aus einem Stator und einem Rotor, und seine Funktionsweise umfasst vier Schritte.
1.2.1 Der Stator erzeugt ein rotierendes Magnetfeld
Zunächst wird der Stator mit Wechselstrom bestromt, wodurch ein rotierendes Magnetfeld erzeugt wird. Dieses Magnetfeld rotiert mit einer festen Geschwindigkeit, der sogenannten „synchronen Drehzahl“, die durch die Frequenz der Stromversorgung und die Polzahl bestimmt wird.
1.2.2 Das rotierende Magnetfeld schneidet die Rotorleiter.
Zweitens schneidet das rotierende Magnetfeld kontinuierlich die Rotorleiter, um ein elektromagnetisches Drehmoment zu erzeugen. Dieser Schneidvorgang erfordert jedoch eine Relativbewegung, und es muss eine Drehzahldifferenz zwischen Magnetfeld und Rotor bestehen.
1.2.3 Energieumwandlungsprozess
Drittens ist der Prozess der Strominduktion in den Leitern nach dem Durchtrennen und der Umwandlung elektrischer Energie in Rotorenergie abgeschlossen.
1.2.4 Der Rotor erzeugt ein Drehmoment und rotiert.
Schließlich erfährt der Rotor nach der Strominduktion im Magnetfeld eine Kraft, die ein elektromagnetisches Drehmoment erzeugt, welches die Rotation des Rotors und der Last antreibt. Dabei ist zu beachten, dass die synchrone Drehzahl des rotierenden Magnetfelds stets höher ist als die tatsächliche Drehzahl des Rotors; die beiden sind nicht synchronisiert, was den Begriff „Asynchronmotor“ prägt. Diese Asynchronität ist kein Fehler, sondern eine notwendige Bedingung für den Betrieb des Motors. Ohne Relativbewegung findet kein magnetisches Durchdringen und somit keine Leistung statt.
1.3 Definition von Schlupf und Schlupfverhältnis
Die Geschwindigkeitsdifferenz zwischen Magnetfeld und Rotor wird als „Schlupf“ bezeichnet; das Verhältnis von Schlupf zu Synchrondrehzahl als „Schlupfverhältnis“. Vereinfacht ausgedrückt lautet die Formel: Schlupfverhältnis = (Synchrondrehzahl – Tatsächliche Rotordrehzahl) ÷ Synchrondrehzahl. Im Wesentlichen gibt es an, inwieweit der Rotor dem Magnetfeld hinterherhinkt und misst somit die Größe der Relativbewegung.
1.4 Analogie zum Verständnis des Ausrutschens
Stellen Sie sich beispielsweise zwei Läufer vor. Der Vordere läuft mit konstanter Geschwindigkeit, während der Hintere ihn nicht einholen kann. Der Abstandsunterschied zwischen ihnen ist der „Schlupf“, und das Verhältnis dieses Abstandsunterschieds zur Geschwindigkeit des Vorderen ist das „Schlupfverhältnis“. Wären ihre Geschwindigkeiten gleich, würde der Vordere keinen Vortrieb erzeugen, und der Hintere käme zum Stillstand. Dies entspricht vollkommen der Funktionsweise eines Asynchronmotors.
2.0 Kerntheorie: Was ist das Wesen des Schlupfverhältnisses?
Der Kern des Schlupfverhältnisses liegt nicht in der Berechnung der Formel, sondern in der Verbindung zwischen elektrischer und mechanischer Energie. Kurz gesagt, der Schlupf ist die Brücke zur Energieumwandlung in einem Asynchronmotor. Vereinfacht ausgedrückt ist der Schlupf ein Indikator für die Stärke der elektromagnetischen Induktion. Je größer der Schlupf des Motors, desto schneller durchdringt das Magnetfeld den Rotor, desto größer ist der induzierte Strom im Rotor und desto höher ist das Ausgangsdrehmoment des Motors; umgekehrt gilt: Je kleiner der Schlupf, desto ineffizienter ist der Motor.
3.0 Grundsatz: Ohne Schlupf dreht sich ein Asynchronmotor nicht!
3.1 Häufiges Missverständnis bezüglich des Ausrutschens
Dies ist der am häufigsten missverstandene Punkt: Schlupf ist kein Fehler, sondern das Herzstück des Asynchronmotors, der grundlegende Grund dafür, dass er sich dreht und die Last antreibt. Viele denken, je kleiner der Schlupf, desto besser, idealerweise sogar null – das ist jedoch ein Trugschluss. Bei null Schlupf stoppt der Motor sofort und ist unbrauchbar.
3.2 Analogie zum Verständnis der Notwendigkeit des Schlupfes
Dieses Konzept lässt sich auch mit Laufen vergleichen. Nur wenn die Person vor ihr schneller ist als die Person hinter ihr, kann sie die Person hinter ihr anschieben; sind die Geschwindigkeiten gleich, findet kein Anschub statt, und die Person hinter ihr bleibt stehen. Dasselbe Prinzip gilt für Asynchronmotoren. Der Rotor kann sich drehen; seine Hauptfunktion besteht in der Erzeugung von Strom und Drehmoment durch das Magnetfeld, das den Rotor durchdringt. Voraussetzung für dieses Durchdringen ist eine Relativbewegung, deren Größe durch den Schlupf bestimmt wird.
3.3 Praktisches Beispiel für die Schlupffunktion
Ein praktisches Beispiel: Der Motor eines Ventilators ist ein Asynchronmotor. Im Normalbetrieb beträgt sein Schlupf 1 % bis 3 %, was eine stabile Relativbewegung ermöglicht. Werden die Ventilatorflügel jedoch gewaltsam festgehalten, steigt der Schlupf auf 100 %, wodurch der Strom sprunghaft ansteigt. Der Motor versucht zwar, die Flügel anzutreiben, doch ein längeres Festhalten kann ihn beschädigen. Dies ist die Kernfunktion des Schlupfs. Ohne ihn hat der Motor keine Leistung. Daher benötigen Asynchronmotoren im Betrieb einen gewissen Schlupf; er ist Voraussetzung für die elektromagnetische Induktion und die grundlegende Quelle der Drehmomenterzeugung. Dies ist kein Defekt, sondern eine notwendige Bedingung für den normalen Betrieb des Motors.
4.0 Die Theorie der Synchrondrehzahl: Warum ist sie festgelegt? In welchem Verhältnis steht sie zur Schlupfrate?
4.1 Definition und Eigenschaften der Synchrongeschwindigkeit
Die Synchrondrehzahl ist die Rotationsgeschwindigkeit des rotierenden Magnetfelds. Sie ist konstant und bildet die Grundlage für die Berechnung der Schlupfrate sowie den Schlüssel zum Verständnis von Schlupfratenänderungen. Ihre Größe wird nur durch zwei Faktoren bestimmt und ist unabhängig von Last und Temperatur:
4.1.1 Netzfrequenz (f)
50 Hz (50-mal pro Sekunde wechselnd) in China. Je höher die Frequenz, desto schneller rotiert das Magnetfeld und desto höher die Synchrondrehzahl.
4.1.2 Anzahl der Pole
Gibt die Anzahl der Polpaare in der Hilfswicklung an. 2 Pole = 1 Paar, 4 Pole = 2 Paare. Je mehr Pole, desto niedriger die Synchrondrehzahl. Dies ist auf dem Typenschild des Motors deutlich angegeben.
4.2 Formel für die Synchrondrehzahl und gängige Beispiele
Synchronous speed formula (simple understanding): Synchronous speed = (60 × power supply frequency) ÷ number of pole pairs. „60“ converts the frequency per second to speed per minute. The core logic is still that „frequency and number of poles determine the speed.“ Common Examples (China 50Hz Power Supply):
– 2-poliger Motor: Synchrondrehzahl 3000 U/min, normaler Volllastschlupf 1%~3%, verwendet in Hochgeschwindigkeitsgeräten;
– 4-poliger Motor: Synchrondrehzahl 1500 U/min, normaler Volllastschlupf 3%~5%, der am häufigsten verwendete Motor in der industriellen Produktion;
– 6-poliger Motor: Synchrondrehzahl 1000 U/min, normaler Volllastschlupf 3%~5%, eingesetzt in Geräten mit mittlerer und niedriger Drehzahl.
4.3 Zusammenhang zwischen Synchrondrehzahl und Schlupf
>Kernzusammenhang: Die Synchrondrehzahl ist konstant, der Schlupf hingegen dynamisch. Entscheidend für diese Änderung ist die Rotordrehzahl, die von der Last abhängt. Beispielsweise hat ein 4-poliger Motor eine konstante Synchrondrehzahl von 1500 U/min. Im Leerlauf liegt die Rotordrehzahl nahe bei 1500 U/min (extrem geringer Schlupf), unter Volllast nahe bei 1440 U/min (Schlupf ca. 4 %) und unter Überlast unter 1440 U/min (Schlupf < 1 > 5 %).
5.0 Verlauf der Schlupfrate: Direkt lastabhängig, automatisch anpassbar
5.1 Grundregel der Gleitratenvariation
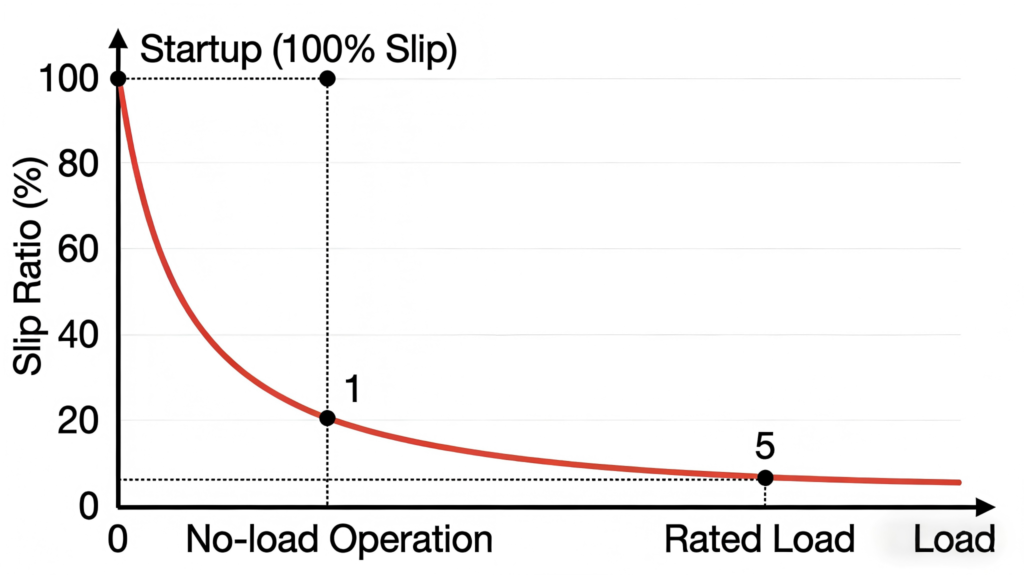
Die Schlupfrate ist kein fester Wert; ihr Haupteinflussfaktor ist die Last, und sie kann sich automatisch anpassen. Je geringer die Last, desto kleiner die Schlupfrate; je höher die Last, desto größer die Schlupfrate. Die Anpassung erfordert keinen manuellen Eingriff, was ein wesentlicher Vorteil von Asynchronmotoren ist und auf der theoretischen Logik der „elektromagnetischen Drehmoment-Last-Anpassung“ basiert. Schlupfratenänderungen lassen sich in vier gängige Betriebszustände einteilen, die wir anhand von Theorie und einfachen Szenarien analysieren und verstehen werden:
5.1.1 Sofortiger Start: Die Schlupfrate beträgt 100 %
Bei einer Rotordrehzahl von 0 beträgt der Schlupf (Synchrondrehzahl – 0) / Synchrondrehzahl = 1, was dem maximalen Schlupf entspricht. In diesem Moment ist die Relativbewegung maximal, der Anlaufstrom beträgt das 5- bis 8-Fache des Nennstroms, und das maximale Anlaufdrehmoment wird erzeugt, um die Rotorträgheit zu überwinden. Fabriken nutzen beim Anfahren großer Motoren die Stern-Dreieck-Anlaufschaltung, um den Anlaufstrom zu reduzieren und die Anlagen zu schützen. Dies basiert auf der Theorie des Schlupfs beim Anfahren.
5.1.2 Leerlaufbetrieb: Die Schlupfrate beträgt 0,3 % bis 1 %.
Im Leerlauf muss der Rotor lediglich seine Eigenreibung und den Luftwiderstand überwinden. Das benötigte Drehmoment ist relativ gering, und die Drehzahl liegt nahe der Synchrondrehzahl, was zu einer sehr geringen Schlupfrate führt. Daher ist auch der Leerlaufstrom gering und die Wärmeentwicklung minimal. Bei der Inspektion eines Motors ermöglicht das Anlaufen im Leerlauf und die Beobachtung von Drehzahl, Geräuschentwicklung und Temperatur die Beurteilung seines grundlegenden Zustands. Dies ist eine praktische Anwendung der Schlupfratentheorie.
5.1.3 Bemessungslast: Die Schlupfrate beträgt 1 % bis 5 %.
Bei Nennlastbetrieb des Motors ist die Rotordrehzahl stabil und der Schlupf im optimalen Bereich. Die elektromagnetische Induktion ist moderat, der Wirkungsgrad maximal und der Temperaturanstieg angemessen. Beispielsweise weist der hocheffiziente Asynchronmotor der Serie Dayou YE3 (IE3-Klasse), 4-polig, 50 Hz, einen stabilen Nennschlupf von ca. 4 % und einen Wirkungsgrad von über 90 % auf und eignet sich somit für den langfristigen industriellen Dauerbetrieb. Er wurde nach den Prinzipien der optimalen Schlupfoptimierung entwickelt.
>5.1.4 Überlastbetrieb: Schlupf 5 %
Wenn die Last den Nennwert überschreitet, wird der Rotor mitgeschleift, was zu einer Drehzahlabnahme und einem erhöhten Schlupf führt. Dies verursacht einen Anstieg des induzierten Stroms, erhöhte Motorverluste und starke Überhitzung. Längere Überlastung kann die Wicklungen beschädigen. Wenn Sie eine Abnahme der Motordrehzahl, eine Überhitzung des Gehäuses und einen zu hohen Stromfluss feststellen, ist dies höchstwahrscheinlich auf eine Überlastung zurückzuführen. Überprüfen Sie in diesem Fall die Last oder mögliche mechanische Blockierungen, um das Problem umgehend zu beheben.
6.0 Die zentrale Rolle des Schlupfs: Bei der Konstruktion, dem Einsatz und der Wartung von Motoren
6.1 Überblick über die Kernrolle von Slip
Die Schlupfwirkung spielt während des gesamten Lebenszyklus eines Motors eine entscheidende Rolle. Jede dieser Rollen ist theoretisch fundiert und eng mit dem praktischen Betrieb verknüpft. Vier Kernrollen lassen sich zusammenfassen:
6.1.1 Einzige Voraussetzung für die Drehmomenterzeugung
Kernlogikkette: Schlupf → Relativbewegung → Magnetfeld am Rotor → Induzierter Strom → Elektromagnetisches Drehmoment → Motorrotation. Schlupf ist der Ausgangspunkt dieser Logikkette. Ohne Schlupf entsteht kein Drehmoment, und der Motor kann nicht laufen. Beispielsweise hat der Motor einer Waschmaschine beim Anlauf 100 % Schlupf, um das Anlaufdrehmoment für die Trommel zu erzeugen. Im Betrieb beträgt der Schlupf 1–3 % und gewährleistet so einen stabilen Lauf.
6.1.2 Automatische Anpassung an Laständerungen
Asynchronmotoren benötigen keine externe Steuerung und können den Schlupf lastabhängig automatisch anpassen: Mit steigender Last sinkt die Rotordrehzahl, der Schlupf steigt und das Drehmoment erhöht sich, bis ein Gleichgewicht erreicht ist; sinkt die Last, steigt die Rotordrehzahl, der Schlupf sinkt und das Drehmoment sinkt, bis erneut ein Gleichgewicht erreicht ist. Beispielsweise erhöht sich bei einem Werkstattventilator der Schlupf automatisch, um einen stabilen Luftstrom zu gewährleisten, wenn Türen und Fenster geöffnet sind (erhöhte Last); werden Türen und Fenster geschlossen (geringere Last), sinkt der Schlupf und spart so Energie.
6.1.3 Bestimmung des Anlaufverhaltens von Motoren
Beim Anlauf beträgt der Schlupf 100 %. Anlaufdrehmoment und Anlaufstrom hängen eng mit der Schlupfauslegung zusammen. Die Konstrukteure optimieren die Rotorstruktur, um ein sanftes Anlaufverhalten zu gewährleisten. Dayou Motors passt seine Produkte zudem an verschiedene Anwendungsszenarien an, um die Anlaufleistung optimal an die jeweiligen Betriebsbedingungen anzupassen.
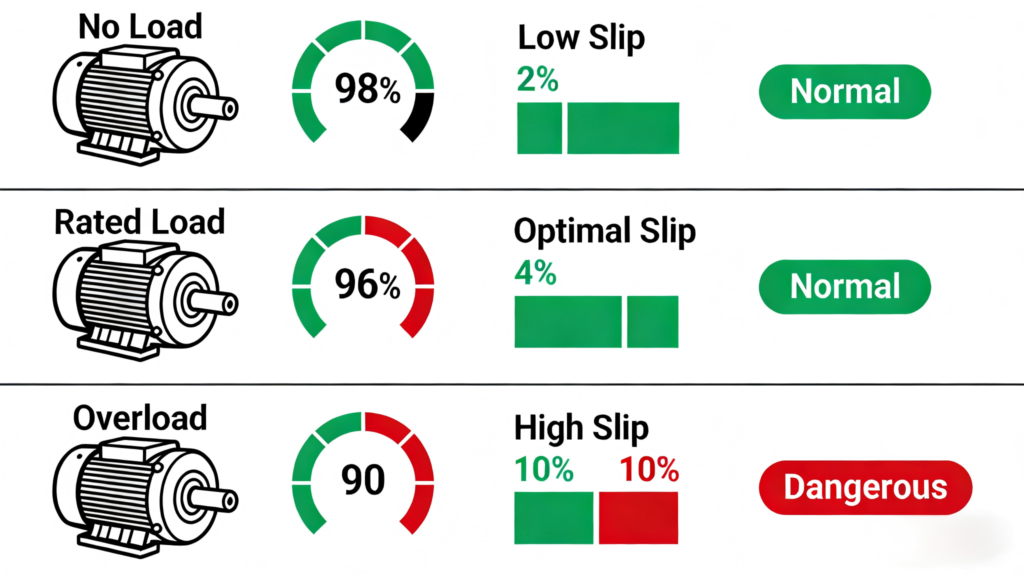
6.1.4 „Indikatoren für die Gesundheitsprüfung“ zur Beurteilung des motorischen Zustands
Anhand des Musters der Schlupfänderungen lässt sich der Zustand des Motors schnell bestimmen:
Bei einem Schlupf von 1% bis 5% unter Volllast kann der Motor normal betrieben werden.
<Bei einem Leerlaufschlupf von 1 % kann der Motor normal arbeiten, jedoch kann ein längerer Leerlaufbetrieb Energie verschwenden.
>Bei einem Schlupf von 5 % unter Volllast ist der Motor überlastet und muss überprüft werden.
Wenn der Schlupf plötzlich stark ansteigt, könnte der Motor eine Fehlfunktion aufweisen.
Wenn der Schlupf sich 100 % nähert, kann der Motor beim Anlauf blockieren und die Wicklungen durchbrennen.
7.0 Zusammenhang zwischen Schlupf und Drehmoment: Die „Visitenkarte“ der Motorleistung
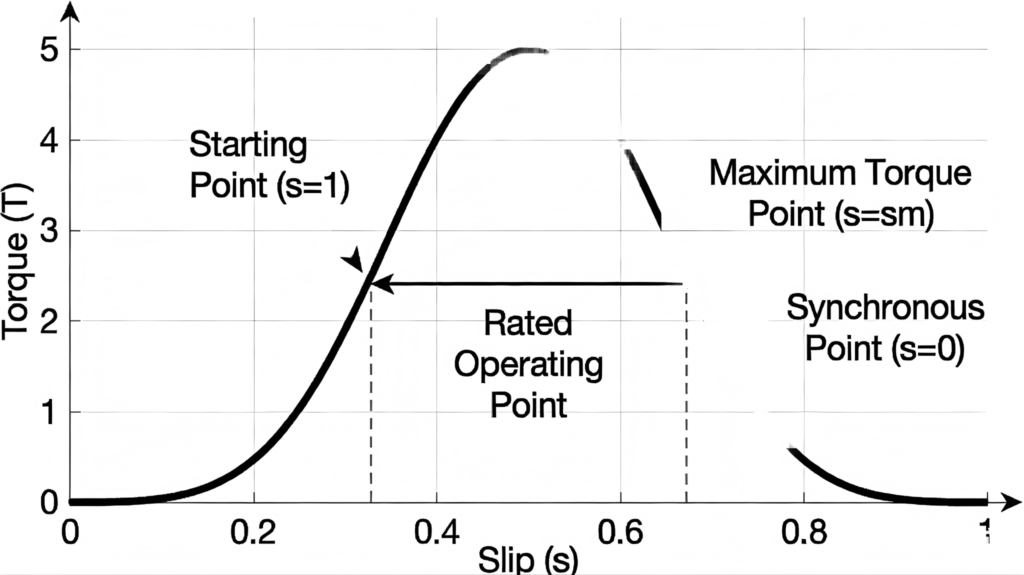
7.1 Überblick über die Schlupf-Drehmoment-Kennlinie (S-T-Kennlinie)
Jeder Asynchronmotor besitzt eine Schlupf-Drehmoment-Kennlinie (S-T-Kennlinie), die den Kern der Motorleistung bildet und Anlaufverhalten, maximales Drehmoment und Stabilitätsbereich bestimmt. Die theoretische Logik der wichtigsten Kenngrößen ist wie folgt:
7.1.1 Ausgangspunkt (s=1): Entspricht dem Anlaufdrehmoment
Im Moment des Anlaufs beträgt der Schlupf 100 %. Das Anlaufdrehmoment entscheidet darüber, ob der Motor anlaufen kann: Bei Anlaufvorgängen mit geringer Last (Ventilatoren, Wasserpumpen) beträgt das Anlaufdrehmoment das 1,0- bis 1,5-Fache des Nenndrehmoments; bei Anlaufvorgängen mit hoher Last (Brecher) muss es das 2,0- bis 3,0-Fache oder mehr betragen, um die Trägheit zu überwinden.
7.1.2 Punkt des maximalen Drehmoments (s=sm, kritischer Schlupf): Entspricht dem Punkt des maximalen Drehmoments
Der höchste Punkt der Kennlinie markiert das maximale Drehmoment, also die maximale Kraft, die der Motor abgeben kann. Dies bestimmt seine Überlastfähigkeit. Wird das maximale Drehmoment durch die Last überschritten, blockiert der Motor. Dayou Motors optimiert die Kennlinie, um das maximale Drehmoment zu erhöhen, die Überlastfähigkeit zu verbessern und einen stabilen Betrieb auch bei Lastschwankungen zu gewährleisten.
7.1.3 Bemessungsbetriebspunkt (s = Bemessungsschlupf): Entspricht dem Bemessungsdrehmoment
Ein Schlupf von 1 % bis 5 % entspricht dem Nenndrehmoment. Dies ist der Punkt, an dem der Motor den höchsten Wirkungsgrad und eine akzeptable Temperaturerhöhung aufweist und gleichzeitig der optimale Betriebspunkt ist. Bei der Auswahl eines Motors sollte darauf geachtet werden, dass sein Nenndrehmoment mindestens dem Lastdrehmoment entspricht, um einen einwandfreien Betrieb zu gewährleisten.
7.1.4 Synchronisationspunkt (s = 0): Entspricht Drehmoment = 0
Rotor und Magnetfeld rotieren mit der gleichen Geschwindigkeit. Ohne Drehmoment kommt der Motor zum Stillstand, was erneut beweist, dass ein Motor mit einem Schlupf von null nicht funktionieren kann. Konstrukteure legen die Schlupfkennlinie für verschiedene Anwendungsfälle fest. Ventilatoren und Wasserpumpen benötigen sanfte Kennlinien, während Brecher steile Kennlinien erfordern. Jedes Produkt von Dayou Motor kann an den jeweiligen Anwendungsfall angepasst werden, um den Schlupf zu optimieren.
8.0 Praxisbeispiel: Schnelle Bestimmung des Motorstatus mithilfe der Theorie
8.1 Fallübersicht
Angenommen, eine Fabrik verfügt über einen 4-poligen 50-Hz-Asynchronmotor mit einem Typenschild, das eine Nenndrehzahl von 1440 U/min, eine Leerlaufdrehzahl von 1490 U/min und eine Überlastdrehzahl von 1400 U/min angibt. Mithilfe der Theorie lässt sich sein Zustand bestimmen:
8.1.1 Berechnung der Synchrondrehzahl
4-poliger Motor (2 Polpaare), Synchrondrehzahl 1500 U/min (fest);
8.1.2 Bewertungsstatus
1440 U/min nahe 1500 U/min, Schlupfrate zwischen 1 % und 5 %, normal;
8.1.3 Beurteilung des Leerlaufzustands
1490 U/min nahe 1500 U/min, Schlupfrate 0,3 % bis 1 %, normal;
8.1.4 Beurteilung des Überlastungsstatus
>Die Drehzahl von 1400 U/min weicht deutlich von 1500 U/min ab, Schlupfrate 5 %, gefährlich, Abschaltung und Inspektion erforderlich.
8.2 Fallabschluss
Wie wir sehen, können wir, sobald wir die Theorie der Schlupfrate verstanden haben, den Zustand des Motors schnell und ohne komplexe Berechnungen bestimmen.